[Day11] Face Detection - 使用OpenCV & Dlib:Dlib HOG + Linear SVM
不要被标题一堆名词吓到;当你用过它後,你会惊讶它的易用以及,最重要的,无缝接轨辨识人脸关键点
本文开始
Dlib套件,一个你可能觉得陌生,但在听到Facial Landmark或是Face Alignment时,却几乎一定会用到的强大套件。
以我自己在进行Computer Vision相关功能或专案时,下面几个套件一定是先装好装满:
- OpenCV
- Dlib
- imutils (图片处理常用工具)
再来才会看要做哪一种影像分析,或是训练模型... (训练模型的图片预处理有其他方便的工具,如keras、scikit-learn等)
当你了解如何使用基本工具 (OpenCV & Dlib)来进行人脸分析後,FaceNet、VGGFace、DeepFace等等这些人脸识别模型的使用才会更得心应手。
前面提到过,使用OpenCV & Dlib来做人脸侦测,大概可以分为四种方式:
- OpenCV Haar cascades
- OpenCV deep neural networks (DNNs)
- Dlib HOG + Linear SVM <--
今天说这个 - Dlib max-margin object detector (MMOD)
今天要介绍第三种方式。
Dlib HOG + Linear SVM
习惯上我喜欢称呼这个方法叫Dlib特徵检测,其实从名称其实可以看出一二,
Dlib HOG + Linear SVM与OpenCV Haar cascades其实都是透过检测(滑动视窗)的特徵来辨识物体与位置
今天介绍的方法其背後原理大概可以分成两步骤:
- 提取特徵:透过方向梯度直方图(HOG)来取得正面脸部的特徵
- 训练模型:透过支援向量机(SVM)来做线性的类别区分
最终训练出来的模型就是我们今天要使用的方法。
在辨识准确度上相比,Dlib特徵检测要比哈尔特徵检测高,也不太需要调整参数来提高辨识度。
话不多说,Let's code!
- 在Day9的专案下,同样在
face_detection目录下新增一个Python档案dlib_hog_svm.py
- 在新增的Python档案内输入以下内容 (相关程序码说明在注解内):
# 汇入必要套件 import time import cv2 import dlib import imutils import numpy as np from imutils.face_utils import rect_to_bb from imutils.video import WebcamVideoStream # 初始化模型 detector = dlib.get_frontal_face_detector() # 定义人脸侦测函数方便重复使用 def detect(img): rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) # 侦测人脸,将辨识结果转为(x, y, w, h)的bounding box results = detector(rgb, 0) rects = [rect_to_bb(rect) for rect in results] return rects def main(): # 启动WebCam vs = WebcamVideoStream().start() time.sleep(2.0) start = time.time() fps = vs.stream.get(cv2.CAP_PROP_FPS) print("Frames per second using cv2.CAP_PROP_FPS : {0}".format(fps)) while True: # 取得当前的frame,变更比例为宽300,并且转成RGB图片 frame = vs.read() img = frame.copy() img = imutils.resize(img, width=300) # 取得frame的大小(高,宽) ratio = frame.shape[1] / img.shape[1] # 呼叫侦测函数,取得结果 rects = detect(img) # loop所有预测结果 for rect in rects: # 计算bounding box(边界框)与准确率 - 取得(左上X,左上Y,右下X,右下Y)的值 (记得转换回原始frame的大小) box = np.array(rect) * ratio (x, y, w, h) = box.astype("int") # 画出边界框 cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2) # 标示FPS end = time.time() cv2.putText(frame, f"FPS: {str(int(1 / (end - start)))}", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2) start = end # 显示影像 cv2.imshow("Frame", frame) # 判断是否案下"q";跳离回圈 key = cv2.waitKey(1) & 0xff if key == ord('q'): break if __name__ == '__main__': main() - 在terminal输入
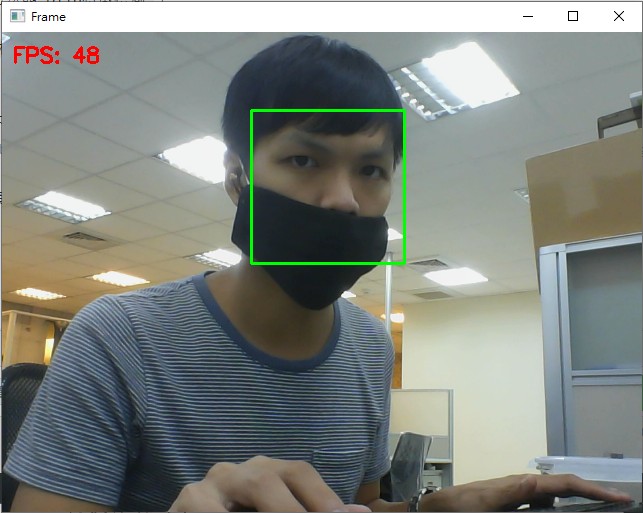
python face_detection/dlib_hog_svm.py,跑出来的范例结果会是这样:
结论
- 我知道有些人看到这边会觉得不想实作,只想看结论;相信我,即使你是复制贴上程序码,实际跑看看,学到的东西跟直接看结论是完全不同的
- Dlib特徵检测会对脸部面向镜头的角度很敏感 (你可以看出我在范例结果中"刻意"把脸转一个角度与把口罩稍微往下移 -- 为了能够辨识到"戴口罩的人脸");其实你从程序码第12行
get_frontal_face_detector函数名称就可以看出来了,这个功能对正面脸的准确度比较好 - Dlib特徵检测基本上不需要调整参数。唯一可能会调整的是程序码第19行
detector(rgb, 0)中的第二个参数:- upsample_num_times:表示在进行侦测之前,要将图片"放大"几次;次数越多越能侦测到比较小的人脸,但花费的时间也更长
- 很重要所以再说一次,你要用Dlib做人脸关键点检测,今天这个方法是你其中一个不会多走远路的选择
- 辨识速度基本上对300px的影像可以有30 fps以上,实际在使用上大概跟哈尔特徵检测的速度差不多
参考程序码在这
好了,今天就到这边,
对程序码有疑问的欢迎留言罗。
<<: Day24 - 铁人付外挂实作付款类别(三)- 接收回传资料
>>: 【Day24】来到了测试的总整理啦 ヽ(‘ ∇‘ )ノ
[Day 29] JS 实作练习 - YouTube API
前言 在练习 Ajax 串接实作时,馒头计画中就推荐就找了几个实作作业,找有开放资源的网站(如:Yo...
Day 11:批次修改!!
昨天体验了一些快捷键和命令,今天要讲的是在 vim 中也很常用的搜寻与取代 搜寻与取代 vim 的搜...
我选择的学习语言跟框架
我选了python当作主要开发语言 因为我以前有用过python而且很潮 框架部分我选比较主流的Dj...
乙级电脑软件设计技术士-Java 考照历程
在网路上很少关於这个科目的介绍,虽然第一次盲考就通过,但是整个过程还是如履薄冰。因此留下这次考试的过...
【day29】修改ProfileFragment X (第三方套件)ImagePicker
好的,我们会发现,有时候我们传送的照片档案太大,以及有可能我们拍完美美的照片时,却发现我们竟然不在...