[DAY 27] 利用Python程序码让机器人走出隧道2
前言
大家好,昨天我们稍微讲解了一下在笔者团队的研究中所需的前置步骤,那麽今天我们就来进入程序码的部分吧!
使自走车走出隧道-续
程序码
#!/usr/bin/env python
import math
from robot_control_class import RobotControl
robotcontrol = RobotControl()
t = 1
stop = False
while t >= 0:
scan = robotcontrol.get_laser_full()
left = min(scan[20:159])
right = min(scan[200:339])
d = right - left
print("d = ", d)
left_pos = scan.index(left)
right_pos = scan.index(right)
pos = 180 - (left_pos + right_pos) / 2
modify_pos = math.radians(pos)
left_slant_pos = left_pos - 20
right_slant_pos = right_pos + 20
left_slant = scan[left_slant_pos]
right_slant = scan[right_slant_pos]
left_side = math.sqrt( left**2 + left_slant**2 - 2 * left * left_slant * math.cos(math.pi / 9))
left_angle = math.asin( left_slant / left_side * math.sin(math.pi / 9))
left_angle = math.pi / 2 - left_angle
right_side = math.sqrt( right**2 + right_slant**2 - 2 * right * right_slant * math.cos(math.pi / 9))
right_angle = math.asin( right_slant / right_side * math.sin(math.pi / 9))
right_angle = math.pi / 2 - right_angle
modify_angle = (right_angle + left_angle) / 2
angle = round(math.degrees(modify_angle))
if stop == False :
if (d > 0.2 and d <= 0.75) :
if (modify_angle < 0) :
print("modify angle=", -angle)
robotcontrol.turn_and_move("counter_clockwise", 0.5, modify_angle)
else :
print("modify angle=", angle)
robotcontrol.turn_and_move("clockwise", 0.5, modify_angle)
elif (d < -0.2 and d >= -0.75):
if (modify_angle > 0) :
print("modify angle=", angle)
robotcontrol.turn_and_move("clockwise", 0.5, modify_angle)
else :
print("modify angle=", -angle)
robotcontrol.turn_and_move("counter_clockwise", 0.5, modify_angle)
elif (d > 0.75) :
modify_angle += math.pi / 18
print("modify angle=" , angle)
robotcontrol.turn_and_move("clockwise", 0.5, modify_angle)
elif (d < -0.75) :
modify_angle += math.pi / 18
print("modify angle=", -angle)
robotcontrol.turn_and_move("counter_clockwise", 0.5, modify_angle)
else :
print("modify pos=", pos)
robotcontrol.turn_and_move("clockwise", 0.5, modify_pos)
else :
if t <= 8 :
x = 0.5 - t * 0.0625
print("slow down , modify pos=", pos)
robotcontrol.turn_and_move("clockwise", x, modify_pos)
else :
print("stop")
robotcontrol.turn_and_move("clockwise", 0, 0)
t = t + 1
if t > 10:
t = 1
stop = not stop
程序码解析
首先,我们先看到以下这段
scan = robotcontrol.get_laser_full()
left = min(scan[20:159])
right = min(scan[200:339])
d = right - left
print("d = ", d)
left_pos = scan.index(left)
right_pos = scan.index(right)
pos = 180 - (left_pos + right_pos) / 2
modify_pos = math.radians(pos)
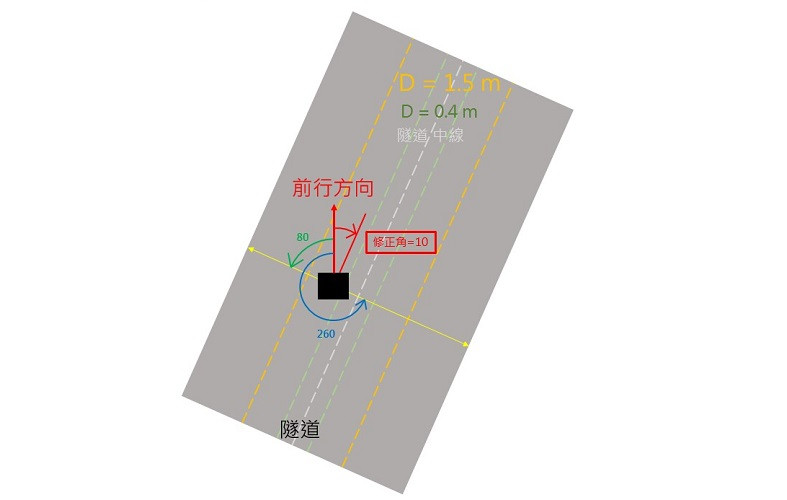
这边就是刚刚提到的找出左右两侧的最短距离(left, right),以及最短距离对应的角度(left_pos, right_pos),范围取20~159以及200~339只是为了约略选出自走车左侧与右侧的雷射扫描范围。变数 pos 算出来的就是目前的前行方向相对於隧道中线的角度。(以下图为例,假设左侧角度为80度、右侧为260度,pos 之值为10,表示目前的前行方向在中线左侧10度),由於 waffle 的角速度单位为 rad/s,因此下一行再将 pos 转换为弧度。变数 d 用来判断目前自走车的位置是偏中线左侧还是右侧。
left_slant_pos = left_pos - 20
right_slant_pos = right_pos + 20
left_slant = scan[left_slant_pos]
right_slant = scan[right_slant_pos]
...
modify_angle = (right_angle + left_angle) / 2
angle = round(math.degrees(modify_angle))
这一大串的意义在於因为几次模拟下来,透过 modify_pos 所修正的幅度较小,当自走车行进到弯道处时偶尔就会来不及跟上弯道的曲率而撞墙,因此笔者团队决定再利用两斜边来找出一修正角。虽然过程有点冗长但其实只是大量的三角函数关系,为节省篇幅这边就先不解释。但值得注意的是,modify_pos 之值有正负之分,但 modify_angle 的值皆为正值,是因为过程中使用 asin 的关系,因此在使用时需要注意。
在讲解一大串的 if 判断式之前,我们先来看看外面的部分:
t = 1
stop = False
while t >= 0:
...
if stop == False :
...
else :
if t <= 8 :
x = 0.5 - t * 0.0625
print("slow down , modify pos=", pos)
robotcontrol.turn_and_move("clockwise", x, modify_pos)
else :
print("stop")
robotcontrol.turn_and_move("clockwise", 0, 0)
t = t + 1
if t > 10:
t = 1
stop = not stop
由於笔者团队之研究主题为自走车搭配点云雷达扫描隧道,因此希望自走车每走一段路程後便能够停下来,所以便利用了 bool 来判断当前是否需要停下。可以看到初始之 stop 为 False,每当执行一次回圈,变数 t 便会+1,直到大於10时便会变换 stop 当中的 bool 值。当 stop 为 True 时,便会将前行速度的参数值 x 逐渐减少至0,达到让自走车停下的效果。
至於为什麽不直接在第一个 else 当中使用函式 stop_robot(self) 呢?这是因为笔者团队发现每次执行函式 stop_robot(self) 後,自走车在接近停下时就会神秘的抖动一下,导致自走车的前行方向偏离隧道中线非常多,甚至有时候会直接转头过去面向隧道墙壁。笔者团队试过调整 class 当中的各项参数值、修改函式等等,但还是没办法解决这个现象,实在是让笔者团队相当头痛,因此想出这个让自走车逐渐停下的方法,实际测试後也确实与原本执行 stop_robot(self) 还要好很多。当然或许还有某些地方是笔者团队所疏漏的,因此目前在这部分就只能先以此方法来作为解决方案,待日後详细厘清原因後或许就能改善此现象。
接下来就进入 if 判断式当中的内容了,但如果要以文字慢慢解释每一行也不容易,因此这边笔者就以下图来解释:
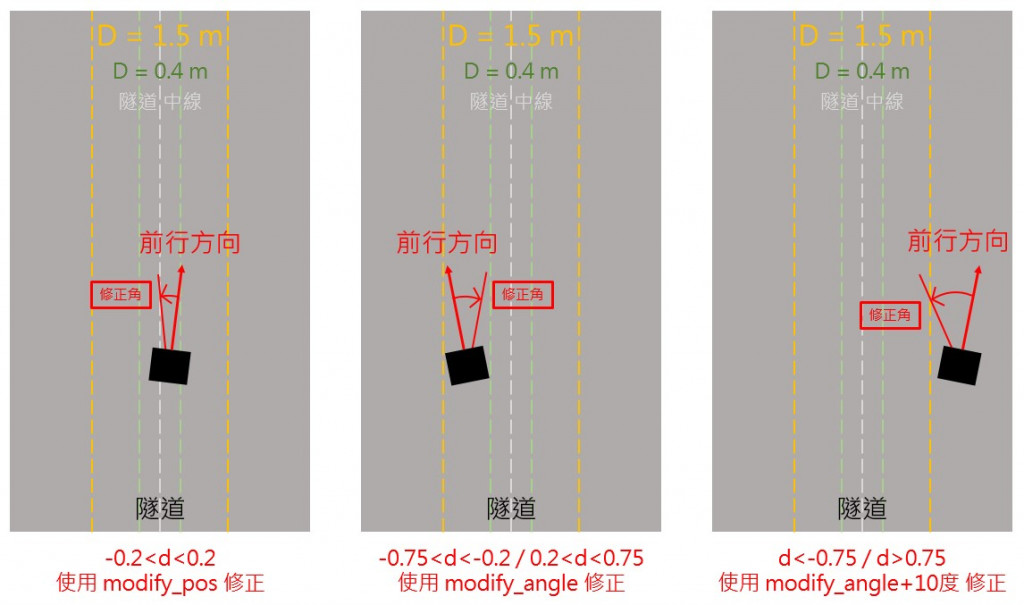
在 if 判断式当中可以看到每个条件式都与 d 有关,这是因为要让自走车判断当前与隧道的相对位置,若是为图中左侧的情形,就视为当前隧道为笔直段,使用 modify_pos 修正;至於中间所代表的则为已偏离中线许多,将隧道视为弯道段,使用 modify_angle 进行修正;右侧则代表已偏离隧道中线非常多,因此将 modify_angle +10度後进行修正,达到快速回到中线之效果。後方将 modify_angle 转成角度仅是作为输出到 Terminal 上时较好读懂度数而已。
至於在部分 elif 下还有再以 modify_angle 做为判断的 if 函式,可由下图来解释:
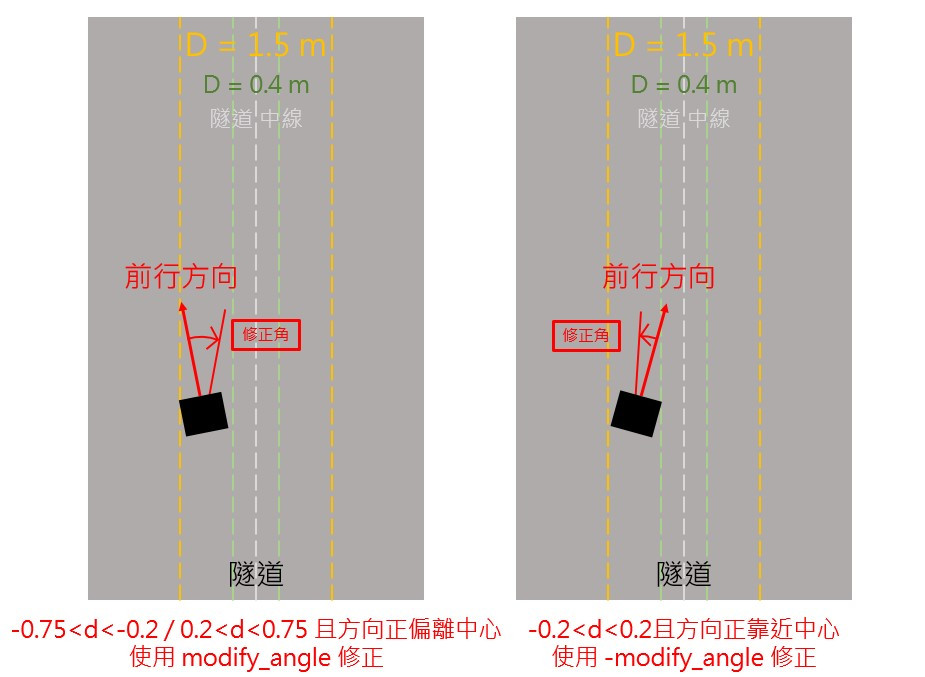
其实最主要就是在判断当前自走车是驶离还是修正,我们可以简单用上图来描述不细分方向的结果:若自走车呈左侧之情形,也就是正驶离中心线的情形,由於 d 判断出目前在中线左侧,若函式中统一使用 "clockwise" 做修正的话,那麽确实会将前行方向往中线修正。但如果今天已经进入了右侧之情形,照理说已经符合预期的修正没错,但由於上方所提到的 modify_angle 皆为正值,因此自走车还会继续顺时针前进,那麽就会使前行方向再度偏离隧道中线,接着进入中线右侧之修正式,再过度修正,如此反覆。这样会让自走车本身的行进路线呈S型,使整体路径变长且更耗费能源,因此针对前行方向再次做细分的优化是有必要的。
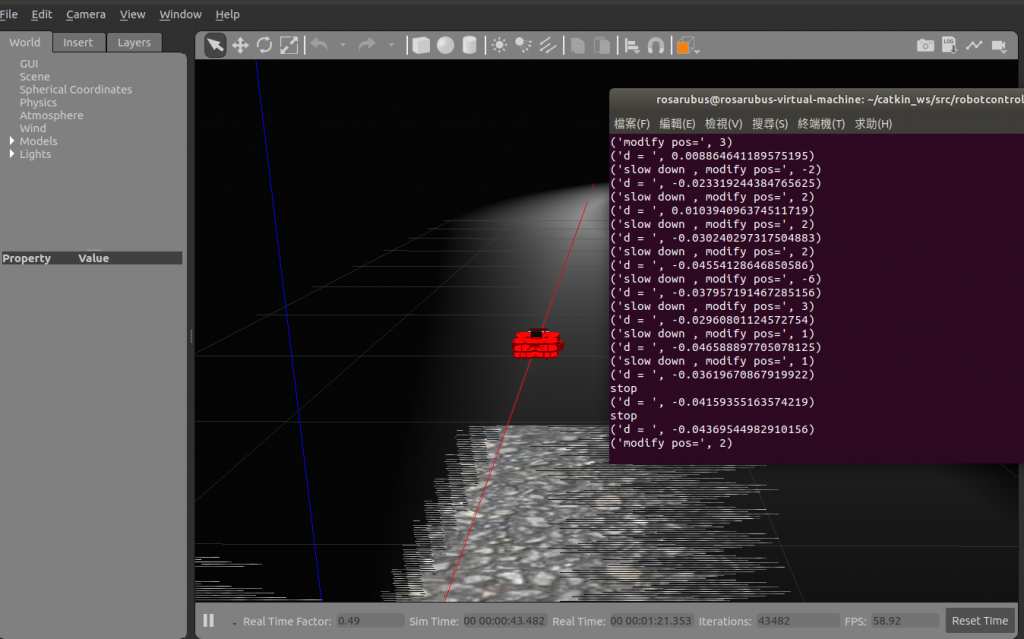
程序码大致就介绍到这边,实际执行程序後,自走车就会慢慢的走出隧道啦!但由於隧道本身太长加上 waffle 的行走速度不快,因此笔者在最後就只放上 waffle 隧道中行走中的图片,可以看到 Terminal 上持续列印出变数 d 、修正角度 modify_pos 或者 modify_angle 以及停下时的各种字串。
结语
这两天介绍了控制隧道内自走车的研究,整体来说比较不像是教学而是解说笔者团队的研究成果,虽然可能还有很多地方做得不够好需要再更加优化,但愿能与更多更了解更 ROS 架构的前辈们有交流的机会。对於不熟悉 ROS 的读者来说,相信也能从这两天的介绍当中多少学到一些 ROS 的相关知识。明天要介绍的内容同样也是与 Gazebo 有关,讲述的是如何在 Gazebo 当中获取机器人的相对座标资讯,请各位敬请期待!

各种无用的Guide与设计模式
(「哪些Guide与设计模式是无用的?」「全部!」) 「设计模式 Design Patten」 这东...
Day-29 : Model验证
开发网站的时候,资料验证非常重要,我们都不希望有一些奇怪的资料塞在里面,所以我们要做验证! 我在书上...
菜主管常有的迷思
分享过我对「什麽是管理」的定义後,在直接进入讨论「如何管理」前,我想花点时间,厘清几个没有实际管理...
资视就是力量 - Highcharts / 尾声
终於,花了一个月的时间,我们从零开始认识 Highcharts 到现在已经能够配合 Vue.js 一...
[DAY 14]cog架构用法(1/2)
目前discord bot已经有初步的功能了 之後写的功能一定会越来越多 决定使用cog的架构来写 ...