[机派X] Day 15 - 把你扳直!来校正飞行控制器吧!
引言
今天是机派X系列文章的第十五天。
昨天刚组装好无人机,今天要为飞行控制器做初始设定以及校正。
本篇大纲:
- 引言
- 安装 APM Planner
- 刷入韧体
- 设定骨架及载具类型
- 罗盘设定与校正
- 关於本文章系列
正如之前提过的,飞行控制器是无人机的控制与决策中枢,就有如电脑中的 CPU 一样。因此首先会针对飞行控制器做初始化设定,以备之後使用。执行相关设定的过程中,会需要与电脑连接,透过电脑上的软件来设定飞行控制器,这边会使用之前介绍过的树莓派与 Ubuntu Server。
安装 APM Planner
首先,让我们安装 APM Planner,APM Planner 是一款无人载具控制软件,能够协助我们设定飞行控制器,甚至在之後也能用於操作无人机的飞行。请访问 APM Planner 官方安装页面,并下载适合自己作业系统的版本。我以树莓派为例,因此选择 Linux 版本。

接下来选择 built from source 就可以到 github 页面下载原始码。

依照 github 中 README.md 中的说明,我们可以透过以下指令来完成 APM Planner 的安装。
git clone https://github.com/ArduPilot/apm_planner.git
cd apm_planner/
sudo apt install qt5-qmake qt5-default qtscript5-dev libqt5webkit5-dev libqt5serialport5-dev libqt5svg5* libqt5serialport5-dev libqt5opengl5-dev qml-module-qtquick-controls libsdl1.2-dev libsndfile-dev flite1-dev libssl-dev libudev-dev libsdl2-dev python3-serial python3-pexpect -y
qmake apm_planner.pro
make
sudo usermod -a -G dialout $USER
sudo apt purge modemmanager -y
若要执行 APM Planner 则可以在专案根目录中执行:
release/apmplanner2
刷入韧体
请将飞行控制器与电脑间使用 USB micro - typeA 连接,连接成功的话,飞行控制器上的指示灯会亮,内建的蜂鸣器也会开始叫。
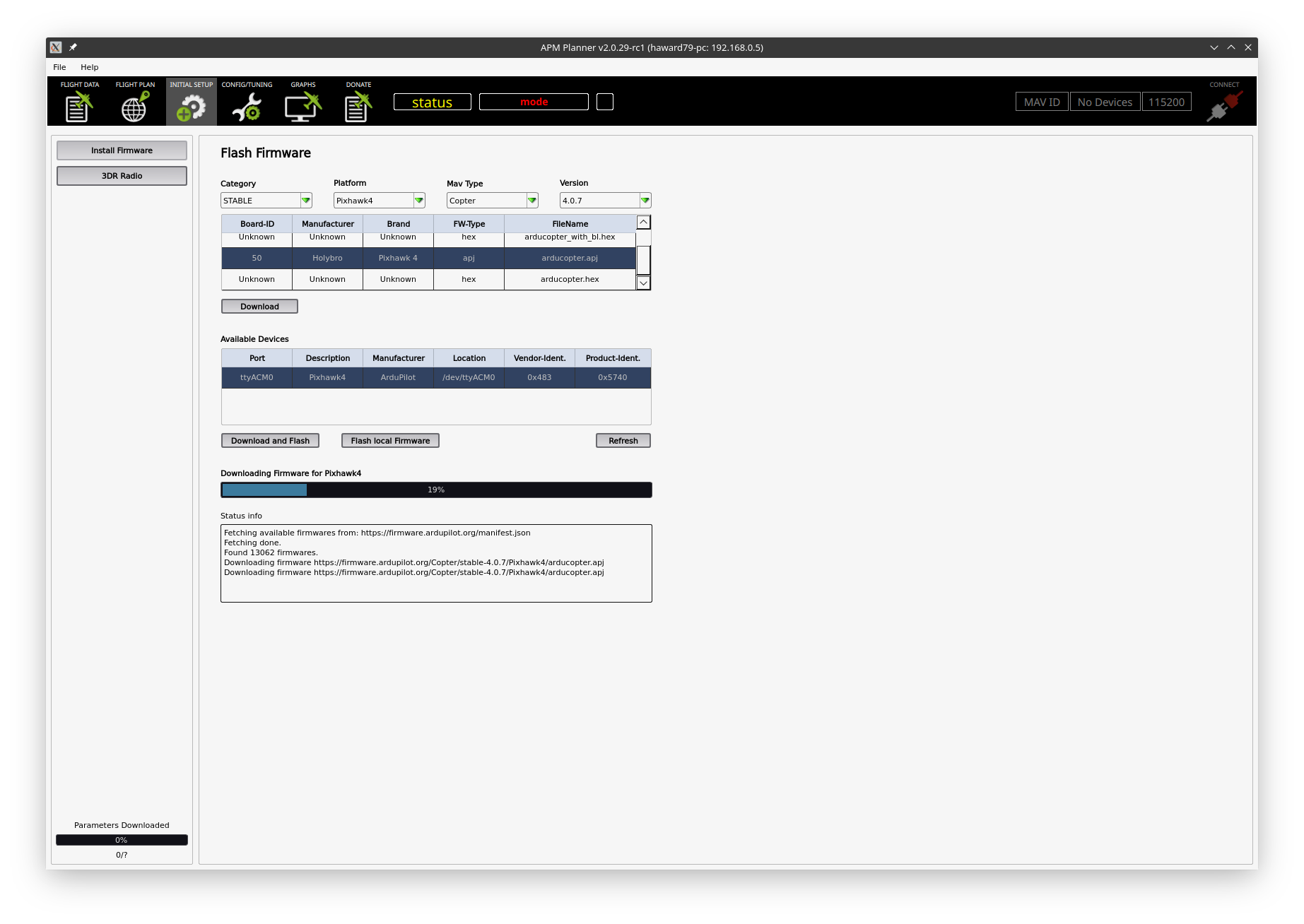
打开 Apm Planner 後,请切换至 INITIAL SETUP 标签,并选择左侧的 Install Firmware 来开启韧体更新页面。接着选择稳定的韧体版本 STABLE 类别、并将平台选择 Pixhawk4 以对应我们的飞行控制器,Mav Type 则是选择 Copter,版本选当前最新版 4.0.7 即可。
在可用的韧体清单中,选择图中所标示的 arducopter.apj ,并选择下方 Available Devices 中的飞行控制板,最後再按 Download and Flash 即可将指定的韧体下载後刷入至飞行控制器中。
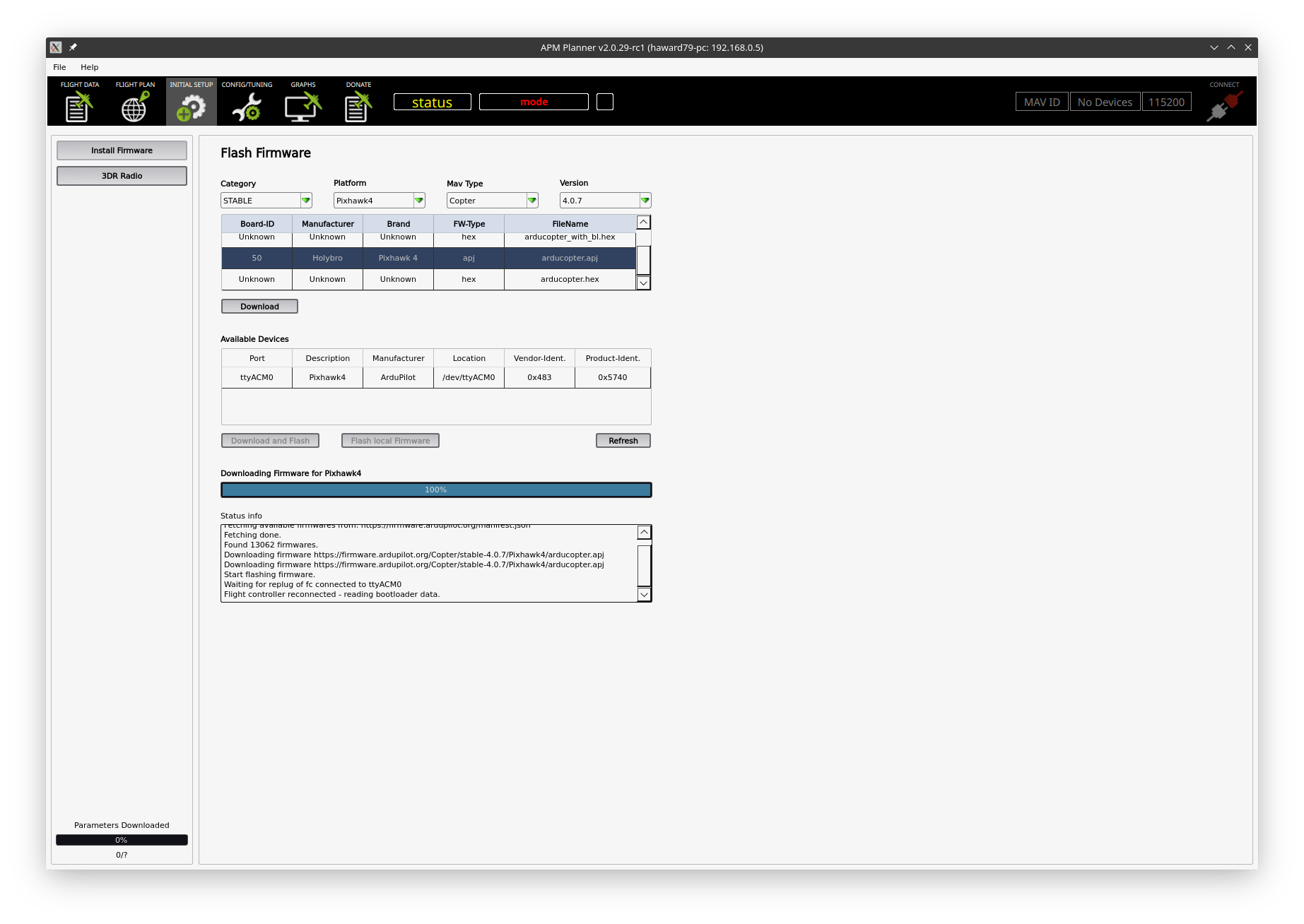
韧体刷入完成後,需要将 USB 拔掉重插,重新上电的飞行控制器会自动完成韧体更新。
可以从 APM Planner 最下方的状态讯息中看到 Flight controller reconnected - reading bootloader data. 代表韧体更新成功,飞行控制器已成功开机。
完成韧体更新後,请设定视窗右上方的设备编号再按 CONNECT 即可让 APM Planner 与飞行控制器连线。
至於 115200 是什麽意思,之後会再说明。
设定骨架及载具类型
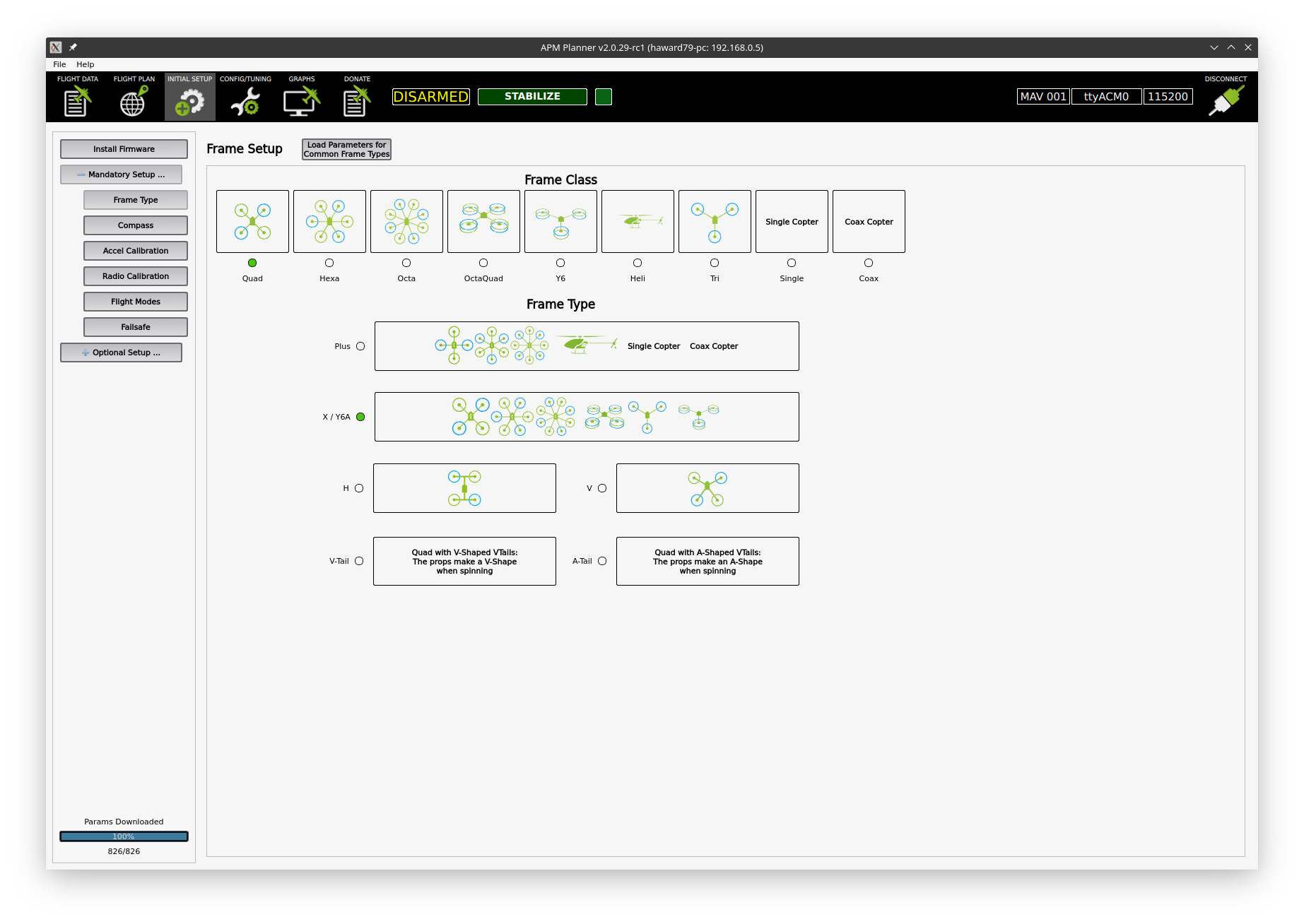
APM Planner 与飞行控制器连接成功後,请选择 INITIAL SETUP 此时应该可以看到 Mandatory Setup 多了一些项目,以下我们会一一设定这些项目来完成飞行控制器的初始设定。
首先是 Frame Type 也就是选择载具类型以及骨架的形状,以我的 H380 四轴无人机为例,我选择图中的 Quad。Frame Type 则是选择 X 型骨架。设定完成後,会自动写入飞行控制器,因此无须苦心寻找存档按钮。
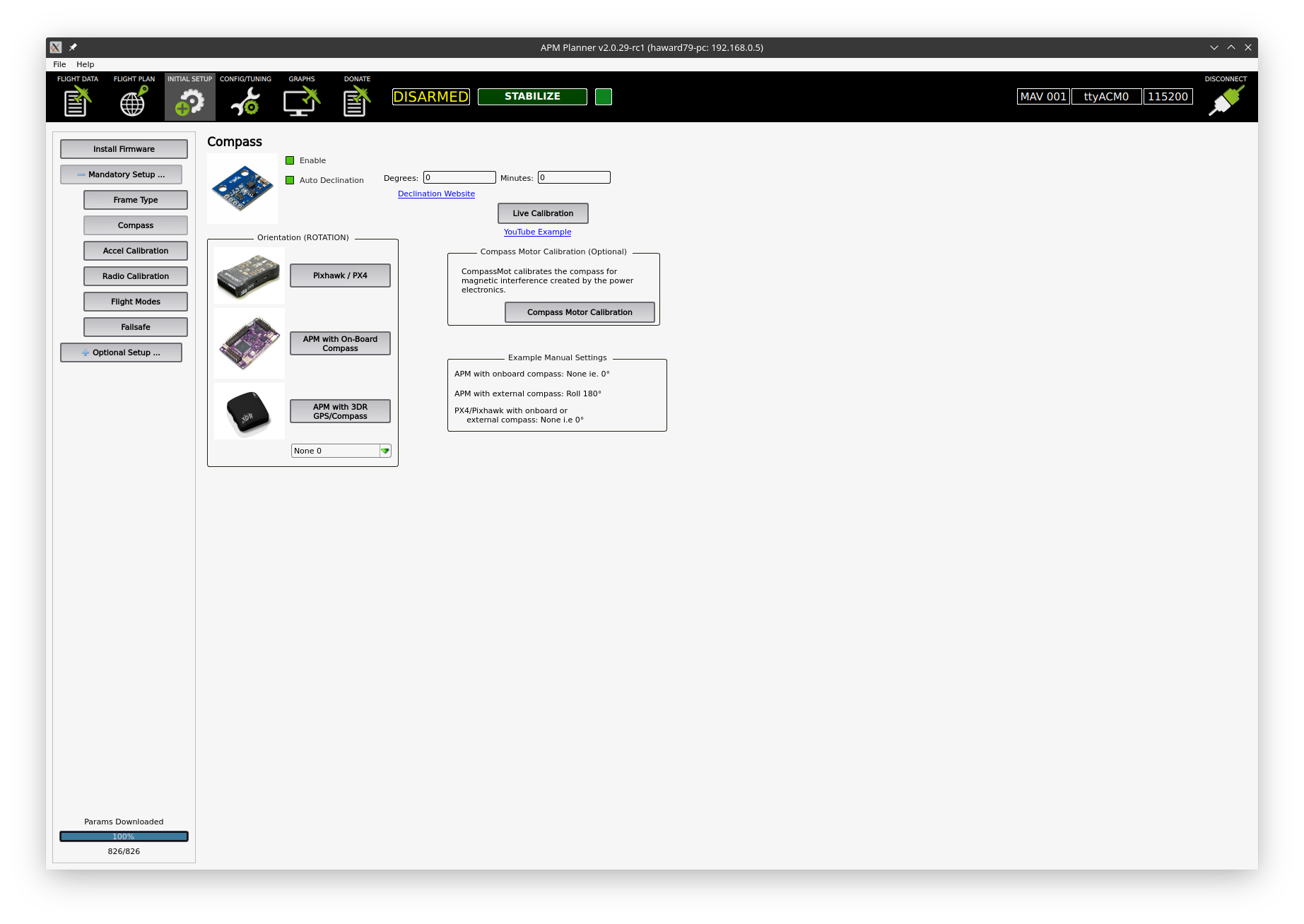
罗盘设定与校正
接下来是罗盘设定与校正,请选择侧边的 Compass 标签。进入页面後,请先选择左侧的 PixHawk / PX4,而下方的 None 0 代表飞行控制器的正前方与无人机骨架的正前方是否有偏角,由於当时安装飞行控制器时我们有将其与机架前方对齐,因此这边保留 None 0 即可。再来就是透过右上方的 Live Calibration 来校正罗盘。
接下来,会弹出说明视窗。
接下来 60 秒内,请 360 度全面旋转你的无人机,在这个过程中飞行控制器会针对罗盘的读值取样并完成校正。
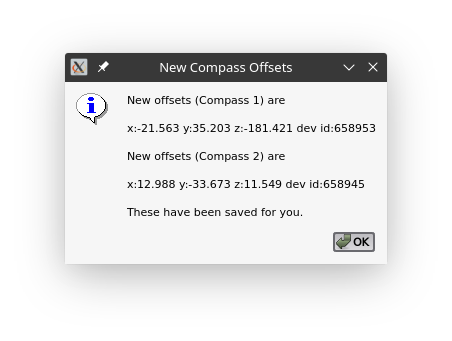
由於飞行控制器中备有两个罗盘,因此会有两组校正数据。我猜其中一个罗盘在 GPS 的香菇头中,另一个在飞行控制器内部。
由於 Pixhawk 4 支援许多载具,例如:模型船、四轴无人机、八轴无人机、模型车等,因此需要根据不同载具来套用不同设定,毕竟每个载具工作原理不相同,没办法共用相同的参数。不过也许你会疑惑,为何需要校正(Calibration)?基本上所有测量仪器使用前都需要规零校正,就像国中使用天枰量测砝码重量时,老师或课本不是也会要求你要先做规零吗?飞行控制器当中的罗盘等感册器也是测量仪器,所以当然也需要规零校正。
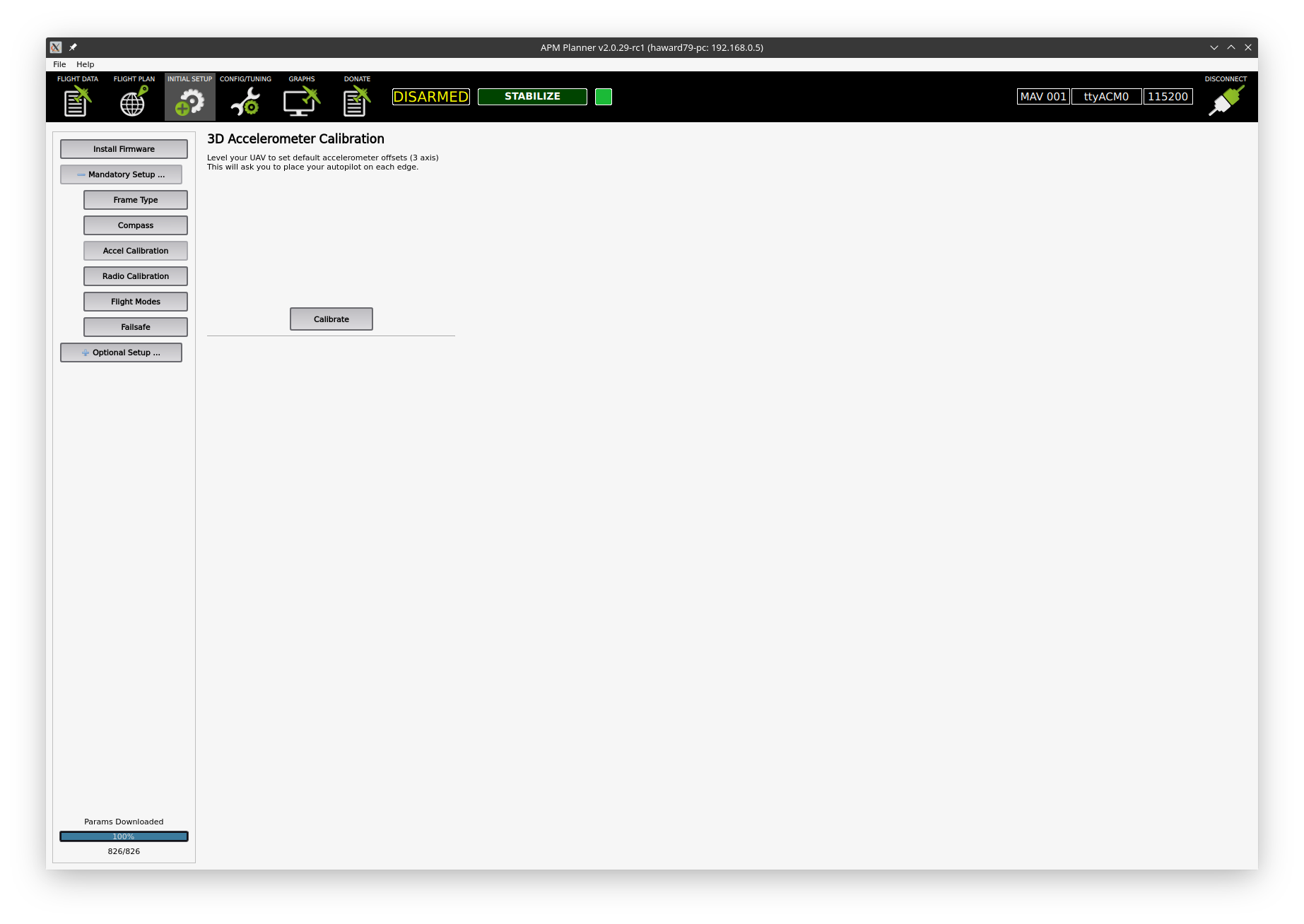
加速度计校正
下来是加速度计的校正,请选择侧边的 Accel Calibration 标签,并在主画面中按下 Calibrate 就可以开始执行校正程序。
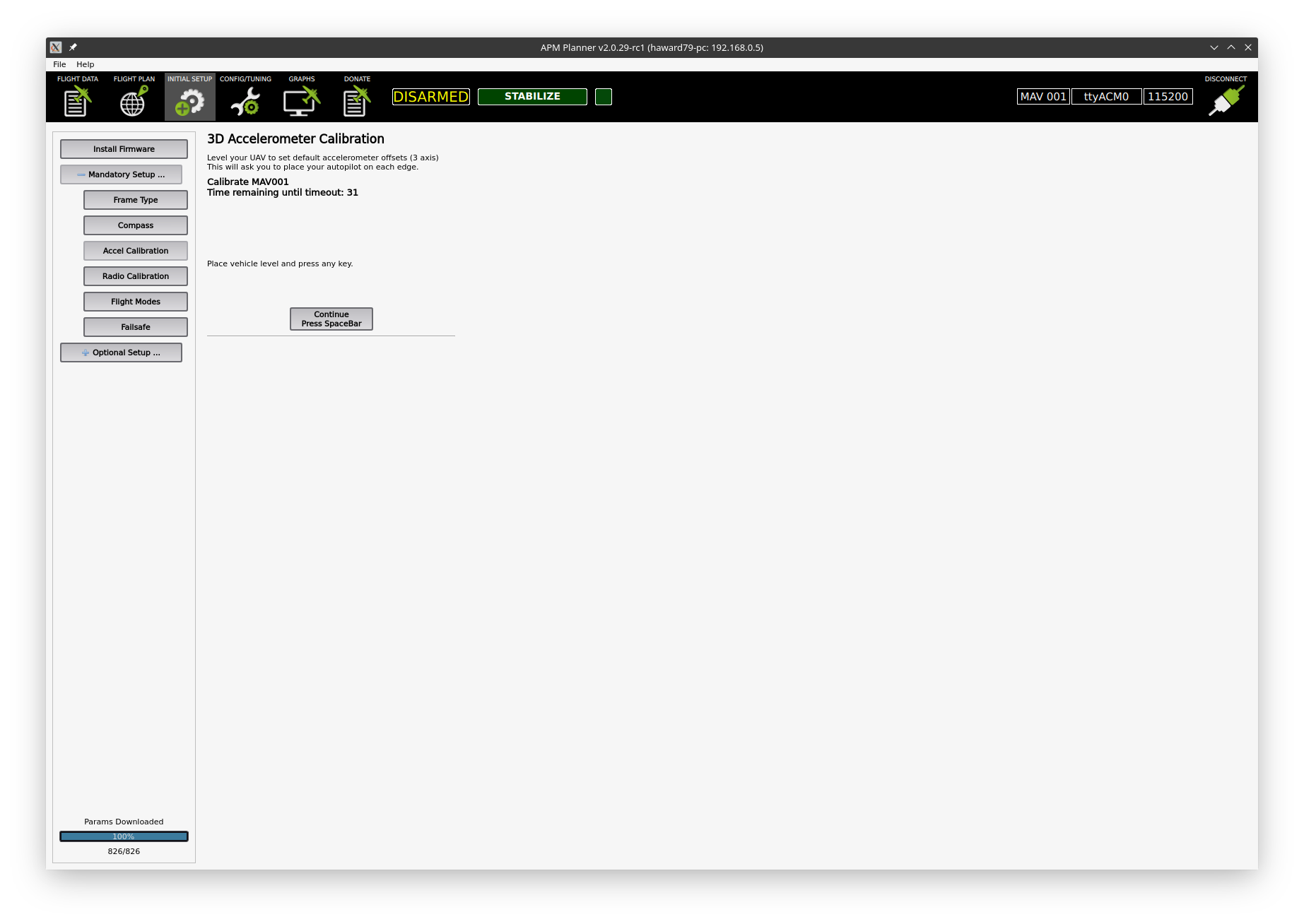
依照指示依序将无人机水平摆放、将左侧朝地摆放、将右侧朝地摆放、将机头朝地摆放、将机尾朝地摆放、将机顶朝地摆放等。
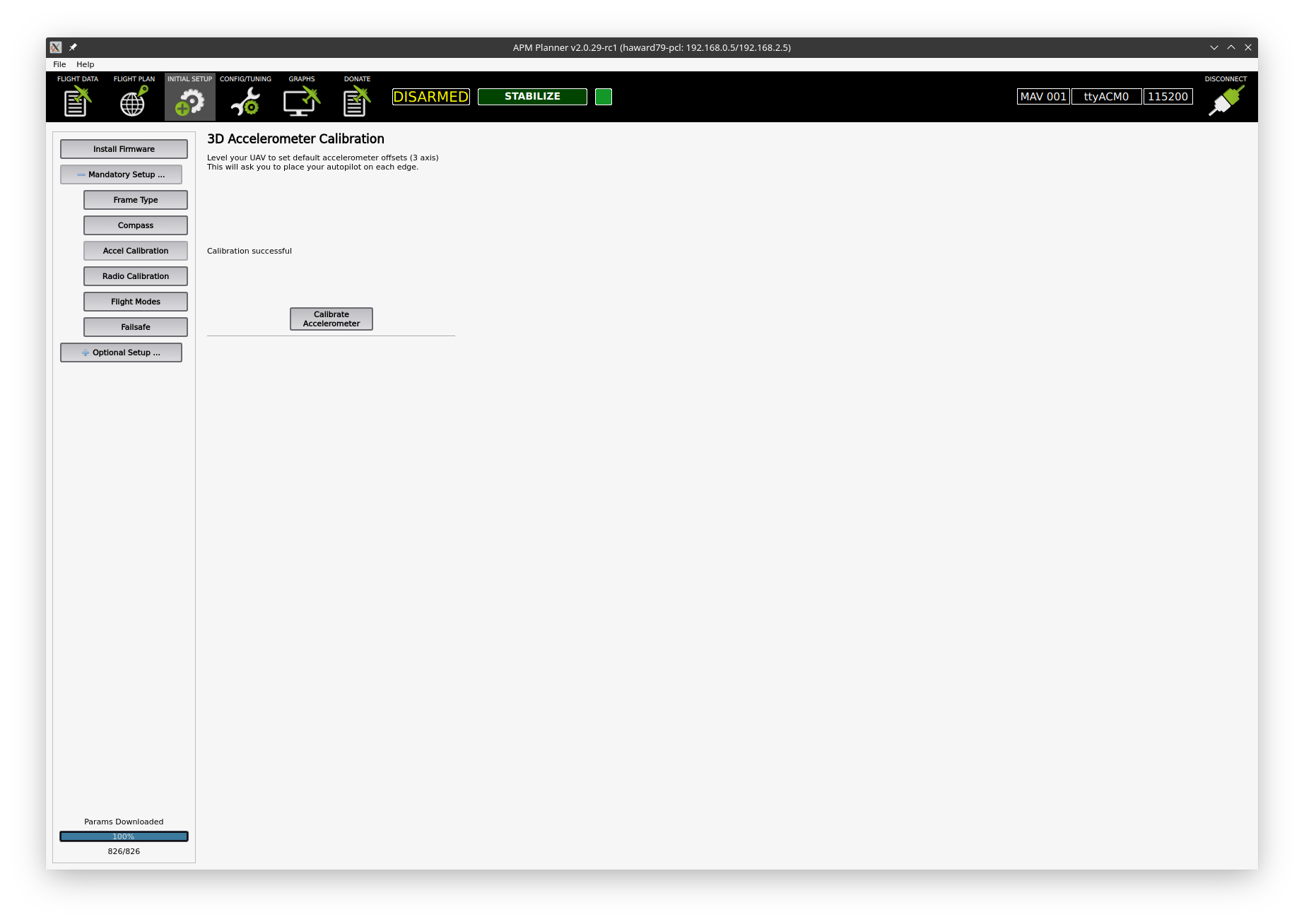
各个方向都完成後,就会得到 Calibration Successful 的讯息。
如果做到一半得到 Calibration FAILED 的讯息,代表操作的过程中方向可能有误,可以再尝试一次。
关於本文章系列
如果对於文章内容有建议、纠错或图源标示不正确的问题,欢迎参考 [机派X] Day 1 尝试与文章作者联络。
想看更多本系列的文章,请连结至 [机派X] Day 1 查看大纲。
>>: [2021铁人赛 Day12] General Skills 09
软件测试覆盖率分析(测试粒度最细)-表达式(expressions)和决策结构
颗粒可视为测量单元。当我们说我们的软件被测试了50%,或者测试覆盖率是50%,这到底是什麽意思,因为...
Day28 D3js Diagram常见的两点浪漫路径
D3js Diagram常见的两点浪漫路径 用途 在绘制diagram图表时,会用到的垂直水平连线,...
DAY30 - 完赛心得与下一步
第一次参加铁人赛,原本以为超前部署,开赛前两个星期就开始准备文章存档 本以为一定妥当的啦,没想到後面...
HERE mSDK - Map Rendering
作为一个地图SDK,最基础最重要的功能首先是地图呈现, 那麽今天我们仍然以 HERE mSDK (P...
如何让Word的数学公式居左,编号靠右
最近公司赞助我到Intelligent Automation & Soft Computin...