[机派X] Day 14 - 下一站,幸福。终於结束累人的安装苦工了
引言
今天是机派X系列文章的第十四天。
昨天将无人机的电源分配版、马达与电子变速器组装好了,今天再把剩下的东西做完吧!
本篇大纲:
- 引言
- 安装飞行控制器
- 安装数传与遥控器讯号接收模组
- 安装树莓派
- 安装 GPS 模组
- 今日安装总结
- 关於本文章系列
安装飞行控制器
延续电源分配版所在的基底,往下延伸一个平台,用於放置飞行控制器。
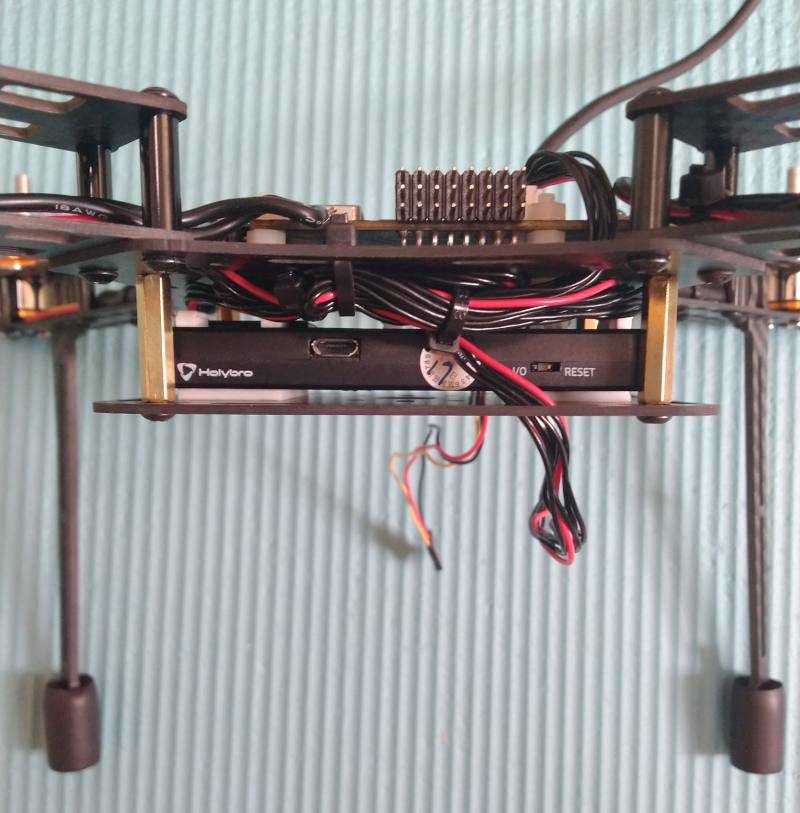
将飞行控制板固定於机板上,由於飞行控制板当中有感测器,因此须遵循板上的箭头安装,板上的箭头方向代表无人机正前方。另外,要顺便将等等会用到的所有连接线都先插好,因为等等安装飞行控制板的平台後空间会很小,不利於插拔线材。POWER1 与 POWER1 插至电源分配版的 PWR1 与 PWR2 脚位 。TELEM1 等等会接到数传模组上。TELEM2 等等会接到树莓派上。DSM / SBUS RC 等等会接到遥控器的讯号接收器上。GPS MODULE 则是 GPS 模组的连接线。I/O PWM OUT 直接连接至电源分配版的 I/O-PWM-IN 即可。

接下来将飞行控制板的基底固定於电源分配板的基底下方,并将多余的线材整理好,避免之後无人机飞行时勾到线材。
整理线材时要避开飞行控制板侧边的插孔,不然之後使用插孔时你会想哭。
安装数传与遥控器讯号接收模组
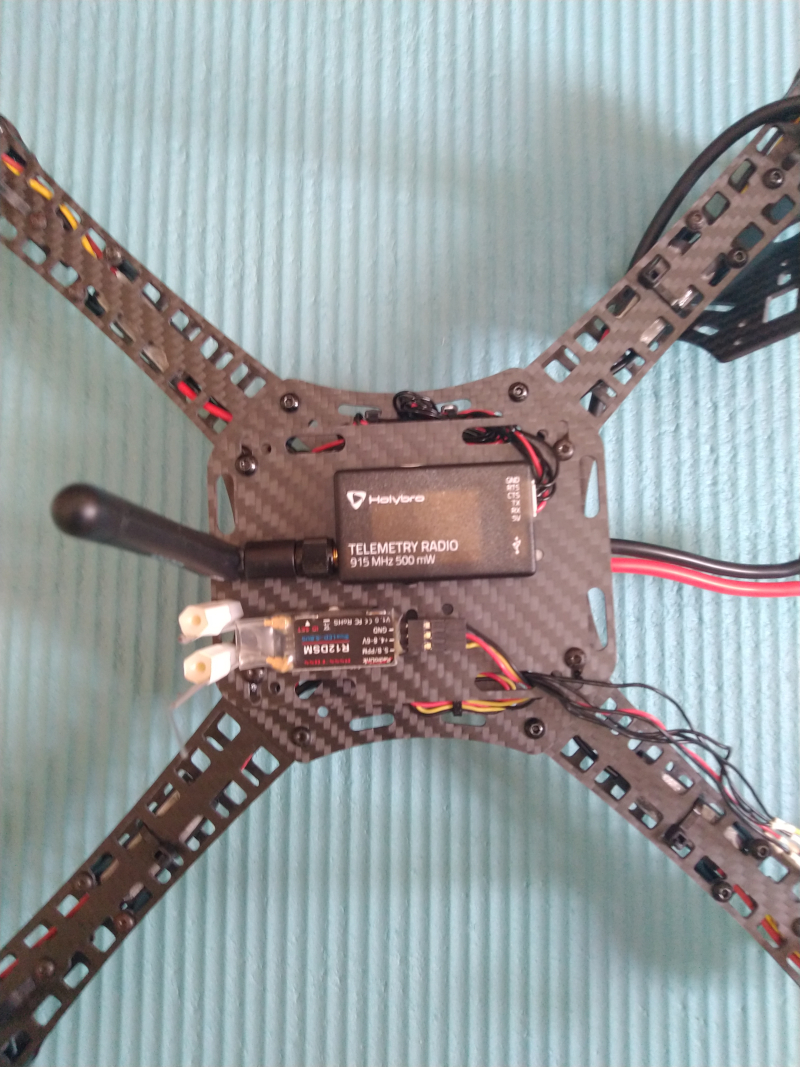
接下来安装飞行控制板两侧的数传与遥控器讯号接收模组。
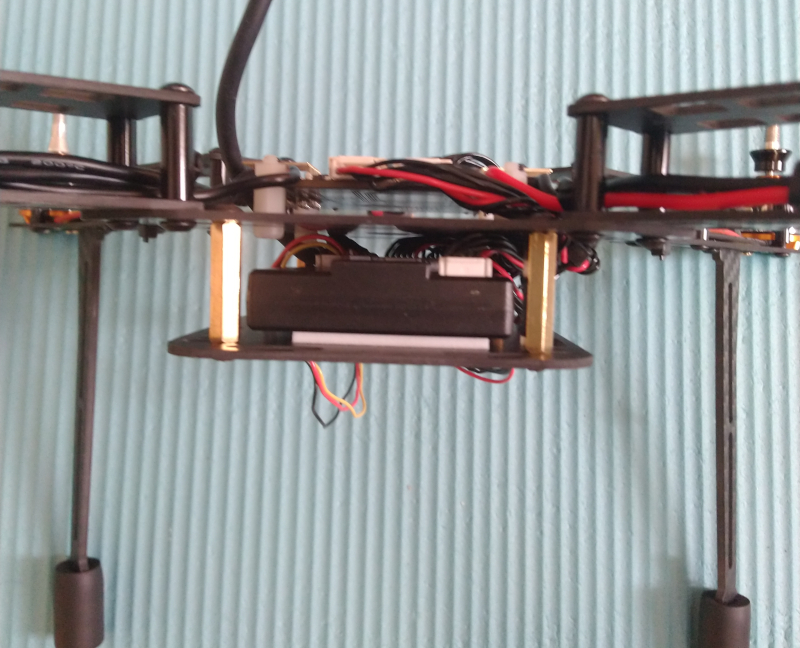
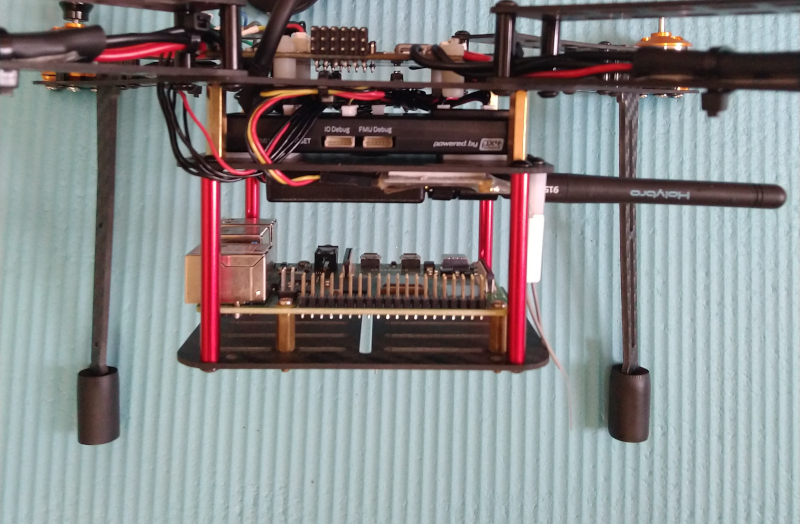
我将遥控器讯号接收模组安装於飞行控制器的底板下,并将刚刚从飞行控制器连接出来的讯号线接到遥控器讯号接收模组上。由於无人机一般是在天上飞,而人通常是在比无人机低的地方操作遥控器,因此我将遥控器讯号接收模组的天线朝下摆置以利讯号的收发。
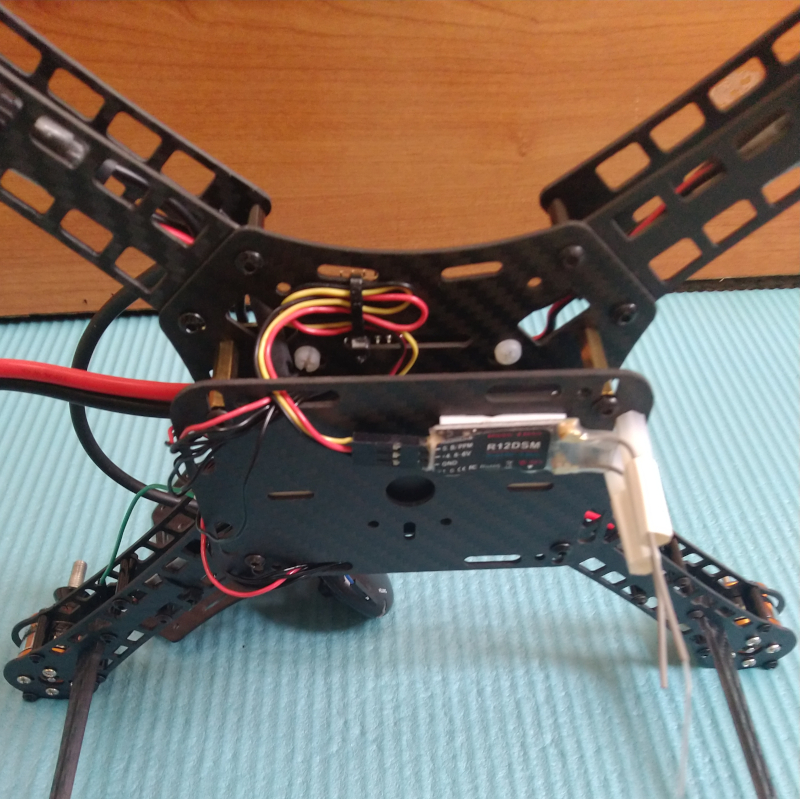
在遥控器讯号接收模组对面,我安装了数传模组。
安装树莓派
接下来安装树莓派。
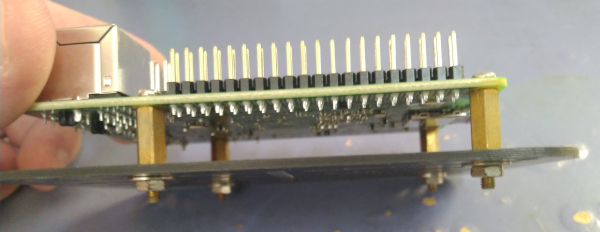
将树莓派固定在底板上。

别忘了碳纤维底板是导体,因此要将树莓派垫高,以免树莓派上的焊点因碳纤维而发生短路。
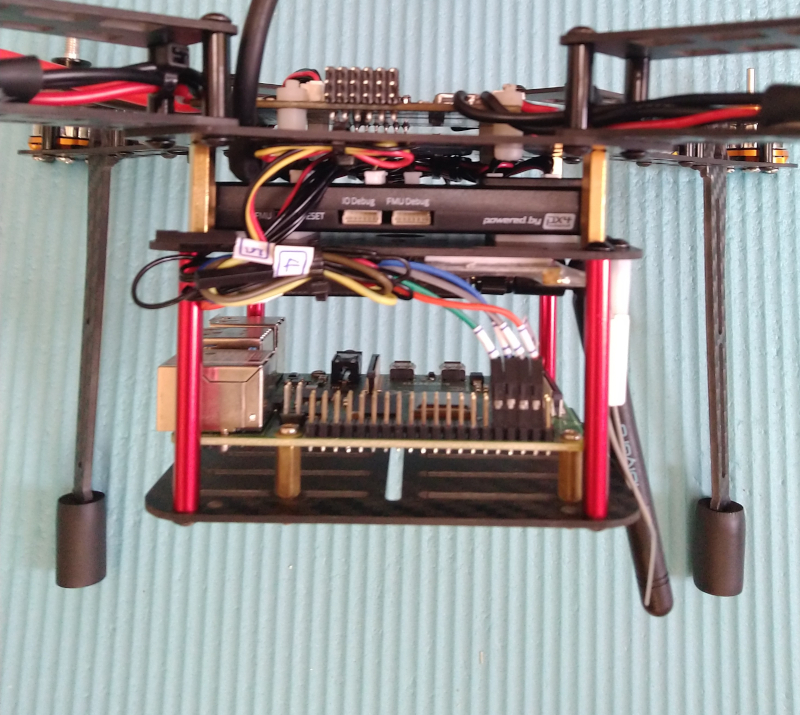
将树莓派这层的底板安装在飞行控制器的底板之下。
将刚刚从飞行控制器接出来的线插到树莓派的 GPIO 脚位上。
具体如何接线以及为何这样接,会在之後的文章中说明。
安装 GPS 模组
最後是安装 GPS 模组。
将 GPS 模组安装在最顶端的旁边,中间的部份要预留给电池。
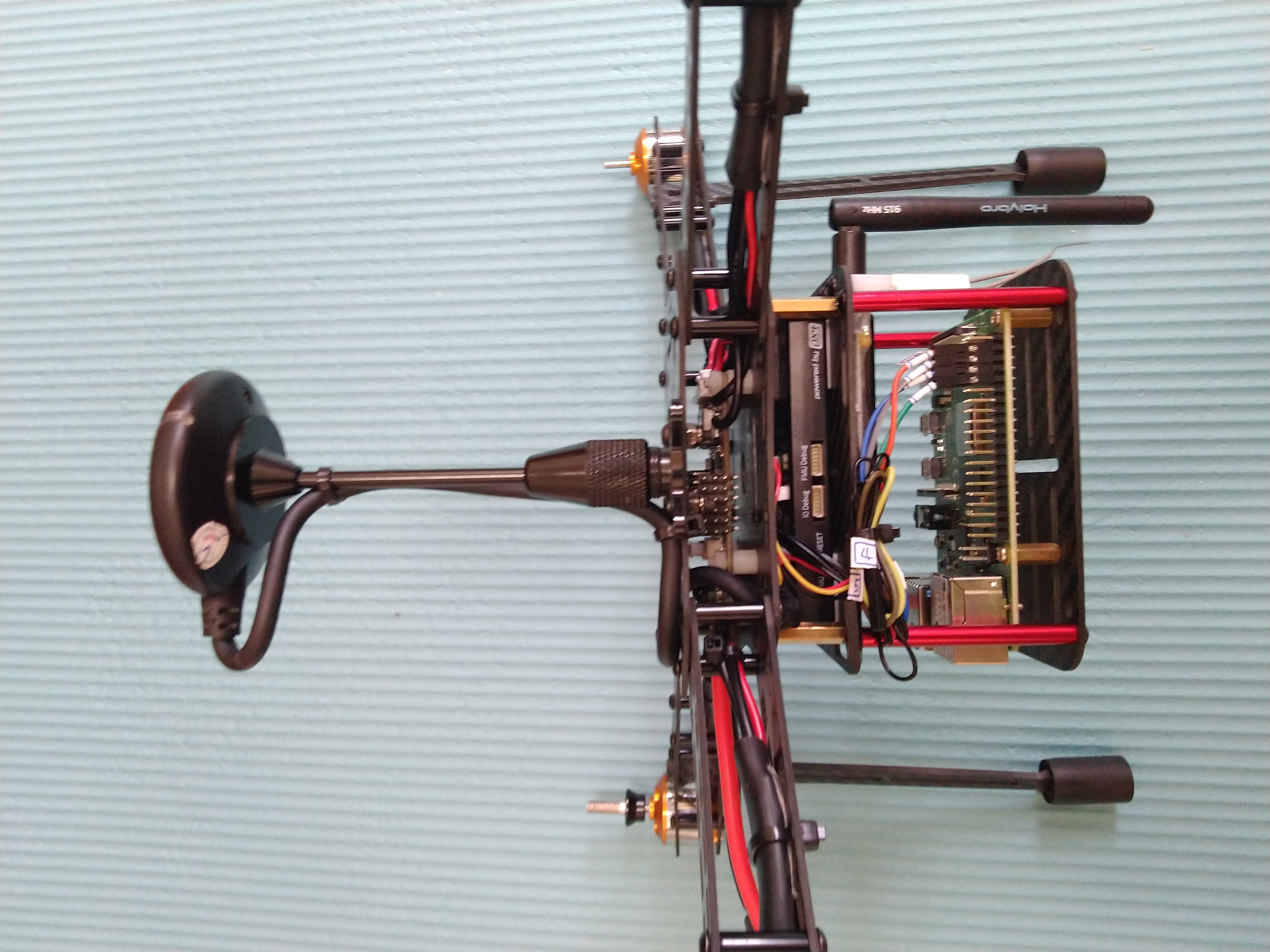
GPS 模组安装时也需要注意方向,因为 GPS 模组中也有感测器。GPS 模组中的香菇头顶端有个箭头,该箭头方向应与飞行控制器上的箭头方向一致。
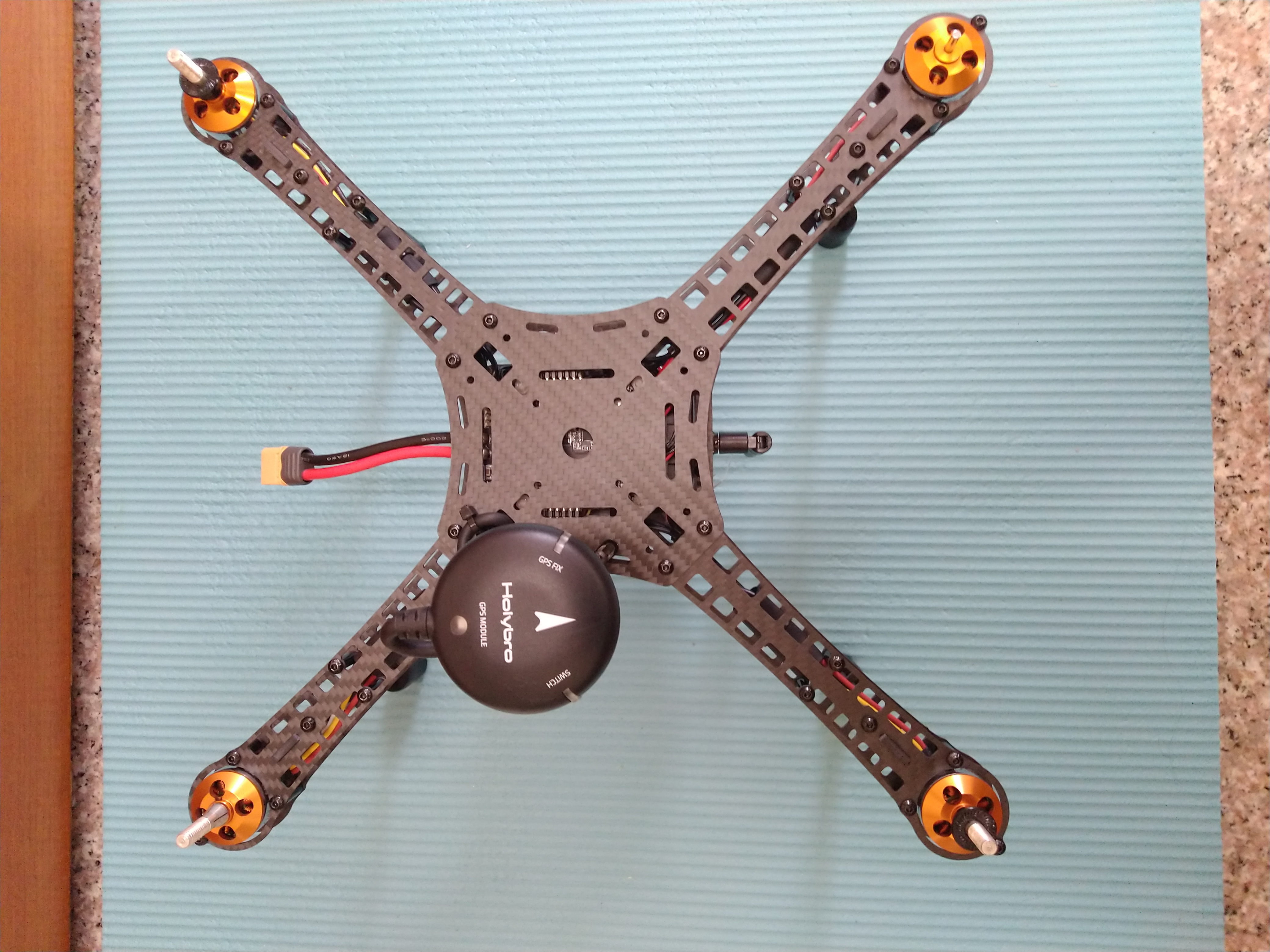
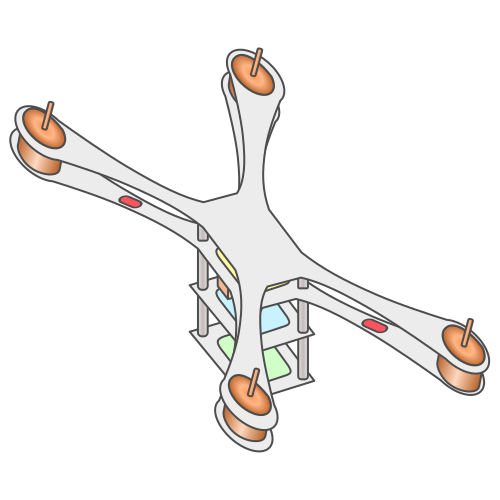
今日安装总结
以下就是今日的无人机安装进度,有机会的话,建议读者实际操作看看。目前我们的无人机已经大致组装完成!之後就可以执行设定及校正的工作。也许你会觉得奇怪,为什麽螺旋桨还没安装呢?因为之後执行初始化设定时,会需要先拆下螺旋桨以策安全,因此这边我们就先不安装螺旋桨。
关於本文章系列
如果对於文章内容有建议、纠错或图源标示不正确的问题,欢迎参考 [机派X] Day 1 尝试与文章作者联络。
想看更多本系列的文章,请连结至 [机派X] Day 1 查看大纲。
D4 第二周 (回忆篇)
今天会是比较划水的回忆篇,可以斟酌看看。 这周开始正式学习 javascript,然後那时候疫情还没...
资视就是力量 - Highcharts / Vue 做个记帐本 (下)
昨天已经将记帐本打造出一个基本雏形了,但似乎功能并不是很多,纯粹就只是看到消费的金额和走向而已,所以...
[Day10] 建立订单交易API_3
笔者在这一章节,进行sign及取得iv的实作 首先由Sign开始,在[Day4] API开发规格书中...
电子书阅读器上的浏览器 [Day11] 移植 Firefox 阅读模式
这一篇的技术成份稍微高一点点。要谈到的功能,从一开始开发浏览器就有想要做,但是一直找不到比较好的实作...
[Day 3]从零开始学习 JS 的连续-30 Days---字串
宣告变数的资料型别 1.数值( Number ) 2.字串( String ) 3.布林值( Boo...