[机派X] Day 13 - 希望是最後一次,动手组装无人机罗
引言
今天是机派X系列文章的第十三天。
昨天终於介绍完无人机上的重要部件,从今天开始会动手组装无人机,组装的过程中也会分享一些无人机运作的相关原理。
本篇大纲:
- 引言
- 安装概观
- 安装电源分配板
- 安装无刷马达
- 安装电子变速器
- 安装机架的支撑脚
- 今日安装总结
- 关於本文章系列
安装概观
正式开始安装前,我们要先规划一下每一个部件要安装在哪个地方,这样之後就可以按图施工、不用怕装错。
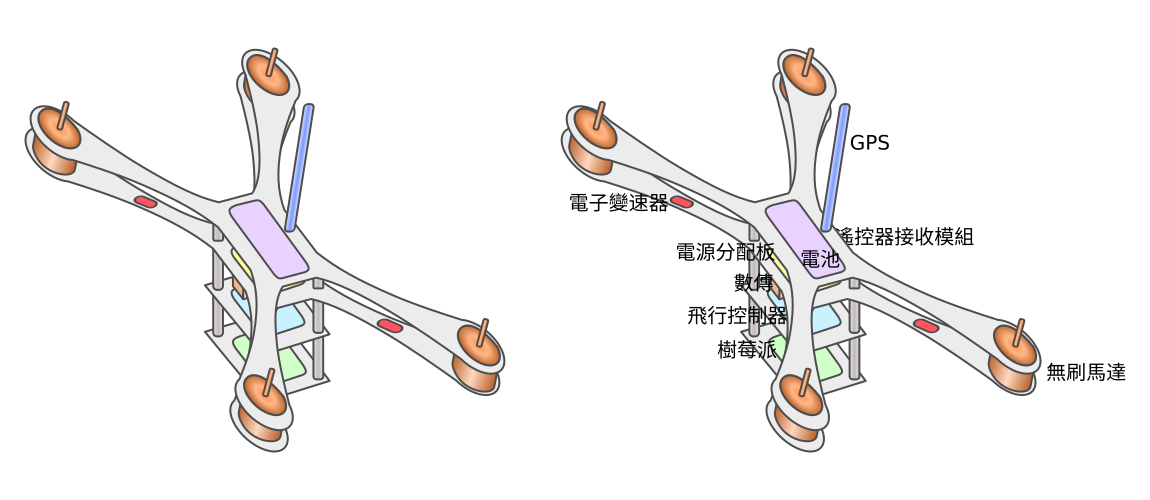
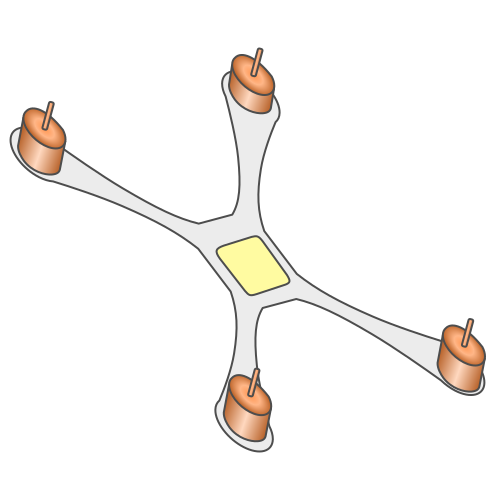
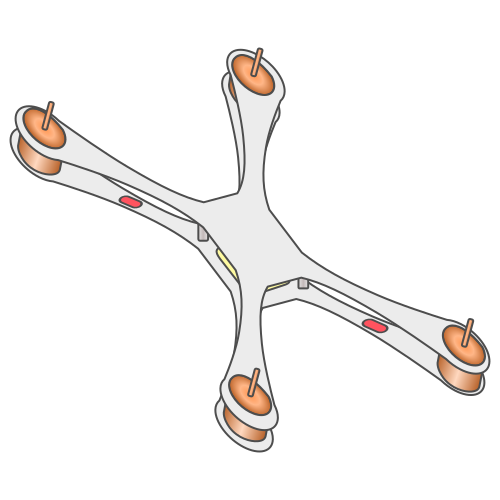
以下是各部件具体位置的抽象画。
在 2D 绘图软件绘制 3D 图真的很难,麻烦大家发挥一下想像力就能看懂这张图!
安装电源分配板
首先,我们从电源着手,开始安装电源分配板。
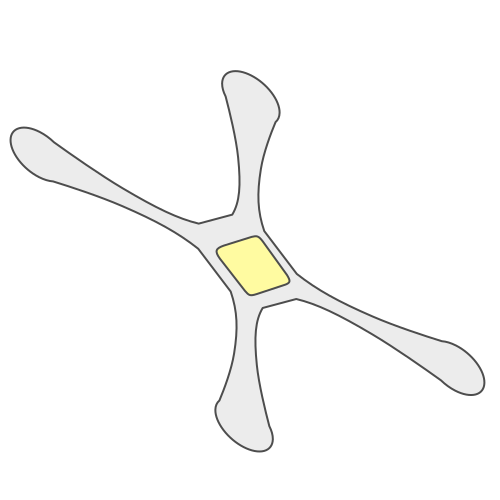
取出一个中央底板,并在底板上锁上电源分配板,由於碳纤维是导体,所以两者之间使用尼龙柱垫高,以防止电源分配板上的焊点直接接触碳纤维底板而发生短路的情况。
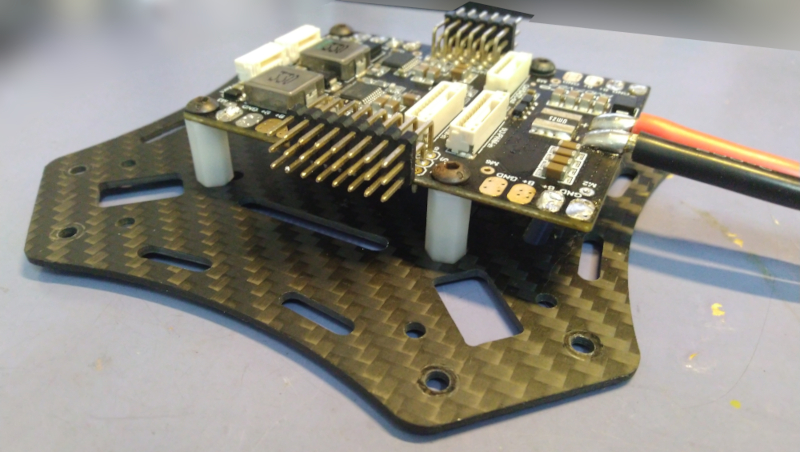
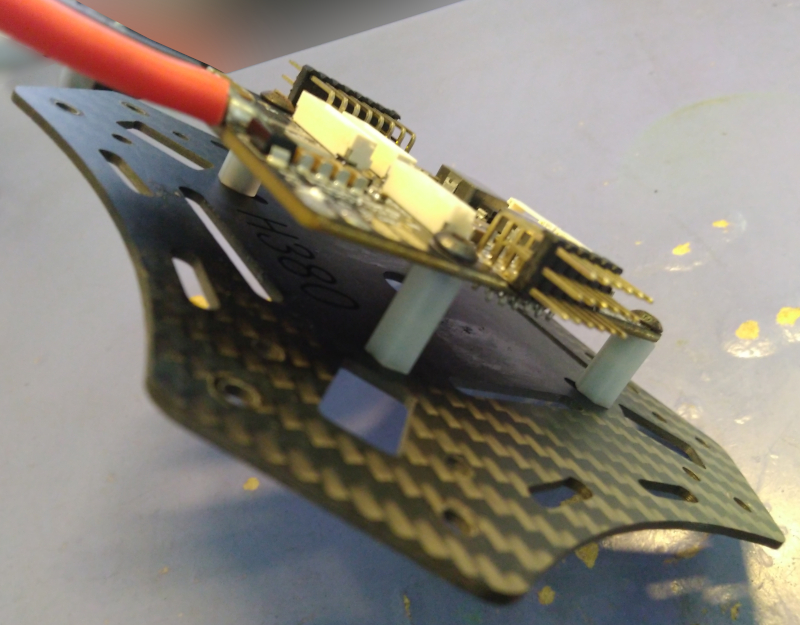
换个角度看,确保尼龙柱高度足够。
安装无刷马达
接着安装机臂上的无刷马达。
用螺丝直接将无刷马达固定於碳纤维骨架上,四个机臂都要做、作法都相同,因此这边仅示范其中一个。
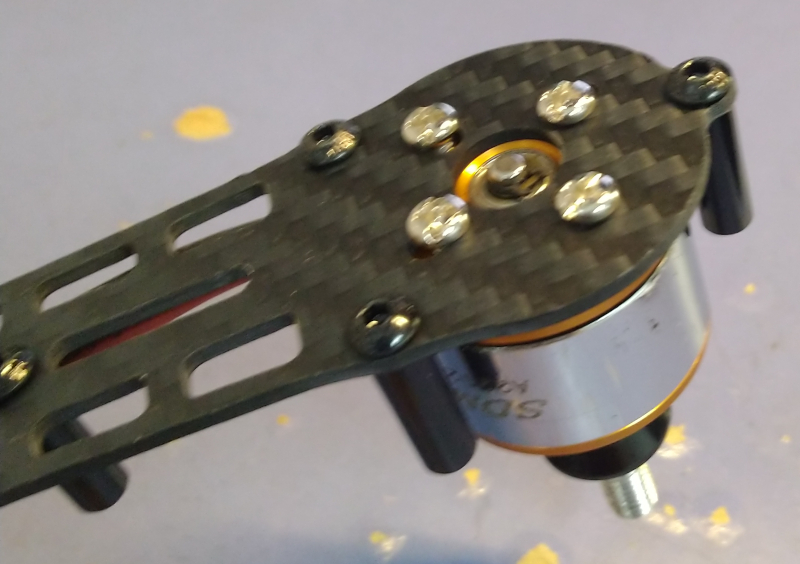
固定完成後,无刷马达的线会是歪向一边的,这样才能避开机架上已经开好的横条孔,那个孔是之後要安装机架的支撑美腿用的。
另外,为了方便布线,我已经把用於固定机臂上片的金属柱锁上了!
安装电子变速器
安装无刷马达与电源分配板之间的电子变速器。
将无刷马达的三相线依序焊接到电子变速器的输出端。
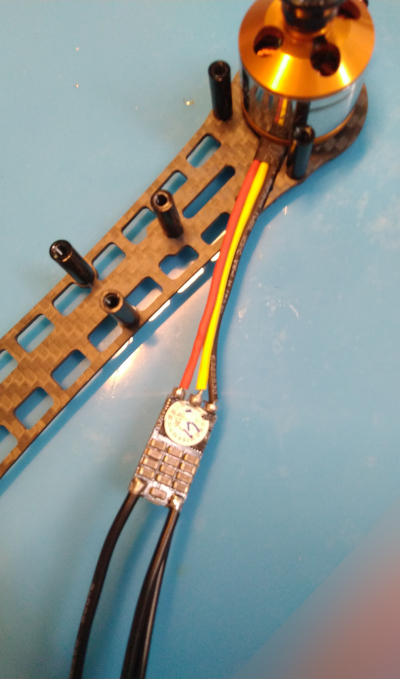
电子变速器的输入端有三条线,分别用於提供 12V 电源与 PWM 形式的转速控制讯号。(这边如果觉得满头问号,可以到前一篇文章中看一下电子变速器小节的说明。)
这边的三条输入端都要接到电源分配板上,也许你会觉得奇怪:PWM 形式的转速控制讯号不是应该由飞行控制器提供吗?没错,不过因为我使用的这块电源分配板有一个孔位可以将飞行控制器的马达转速控制讯号转送至电源分配板的 M1 ~ M8 脚位上,因此这边我们直接使用电源分配板的 M1 ~ M8 脚位!Mx 代表一颗马达的转速控制讯号,x 是马达编号,这块电源分配板最多可支援八颗马达,但我们只需要使用四颗就好,因此选择 M1 ~ M4 来使用。我这边由於线材不足,因此都用黑色电线,请大家见谅。如果资源充足的状况下,建议用颜色区分一下不同功能的电线。
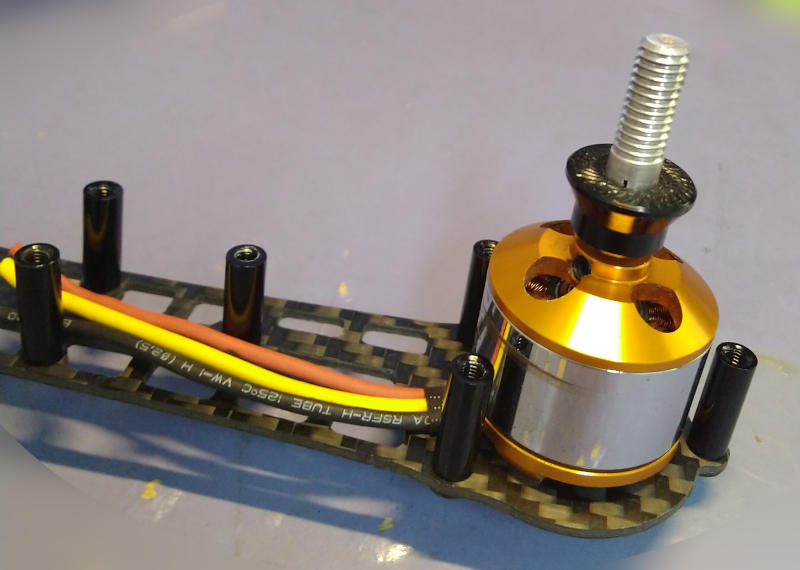
另外,电子变速器若直接接触碳纤维机架也可能会发生短路,因此用热缩管将其包覆再用束带固定在机架上。

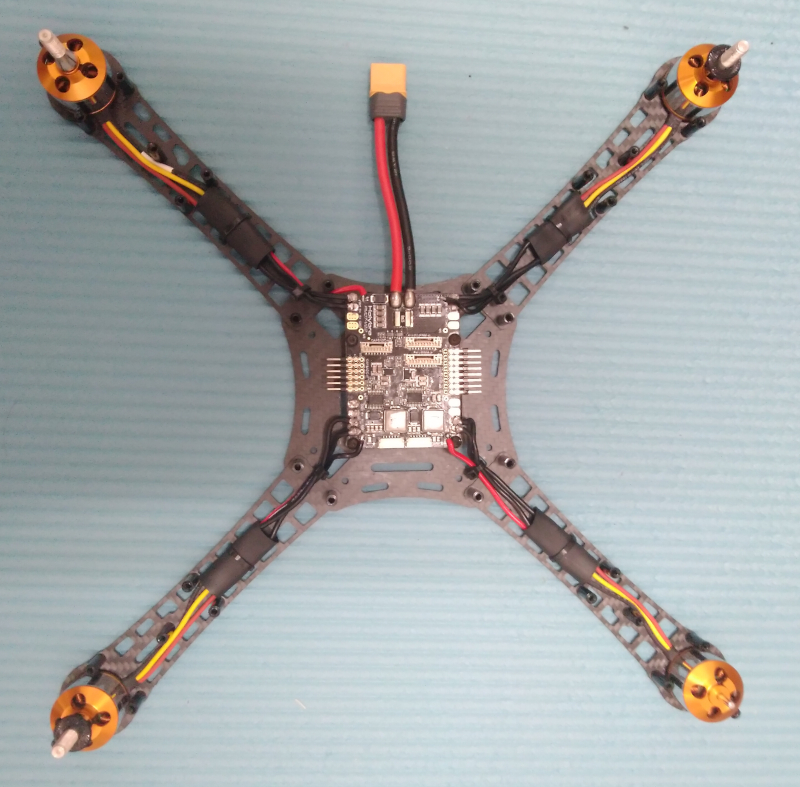
四个机臂都完成後,看起来会是这样。
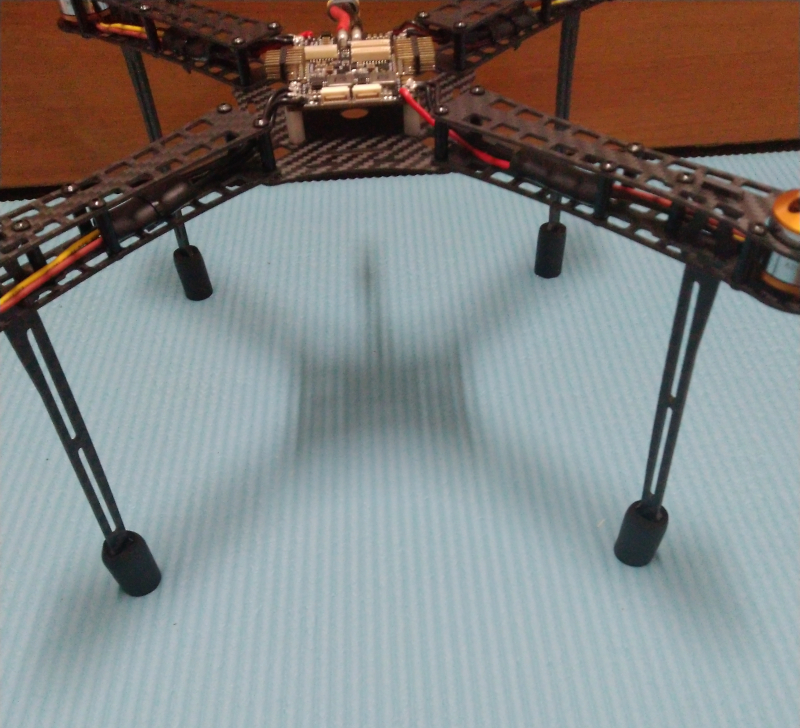
安装机架的支撑脚
完成机臂的底层後,接下来就可以安装机架的支撑脚,安装的过程可能会需要鎚子轻敲一下才能将支撑脚卡入机臂的底层。

还要将机臂的顶层也装上去,机架的支撑脚才算完成安装,不然支撑脚随时都可能会从机臂的底层松脱。

从侧面看会比较清楚。
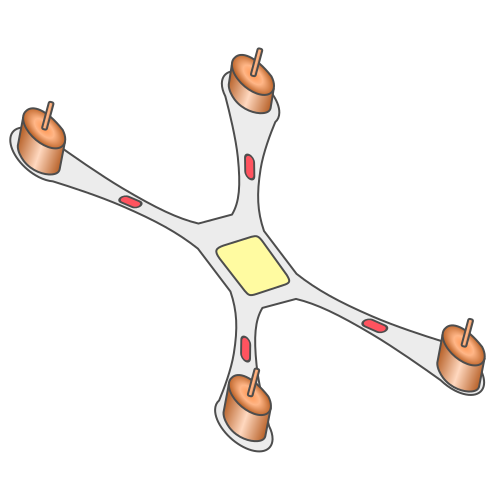
今日安装总结
以下就是今日的无人机安装进度,也许你看这篇文章只需要三分钟,但其实我实际操作超过三小时。有机会的话,建议读者实际操作看看。
关於本文章系列
如果对於文章内容有建议、纠错或图源标示不正确的问题,欢迎参考 [机派X] Day 1 尝试与文章作者联络。
想看更多本系列的文章,请连结至 [机派X] Day 1 查看大纲。
>>: Day10-使用 create-react-app 部署第一个 React static Web
TypeScript 能手养成之旅 Day 10 物件型别-扩充型别-列举(Enum)
前言 上集我们介绍到 Enum 基础用法,今天将来讲解其它用法。 字串列举(String enum)...
CMoney菁英软件工程师战斗营前端课程_Week 11
Hi 本周已开始分领域课程 第一堂课不外乎就是介绍基本HTML语法 每周四都会有个小演习 这次题目是...
DAY26 学习30天的c++
cin成员函数 除了使用setw()函数设定输出格式外,还可用cin成员函数更改cin的预设输入格式...
Day 27. Hashicorp Vault: Install Vault on Kubernetes
Hashicorp Vault:Install Vault on Kubernetes 今天介绍如何...
Day 26:v-if 才做选择,v-show 全都秀
目前的版面配置是基本的瀑布流效果,而此模式较着重在显示书本封面图片,一列只能出现三本书单,RWD 的...