[机派X] Day 12 - 那些年还没介绍的无人机部件
引言
今天是机派X系列文章的第十二天。
今天会接续昨天的部件介绍,将剩下几个重要的部件介绍给大家。
本篇大纲:
- 引言
- 电子变速器
- 螺旋桨
- 遥控器(与接收模组)
- 数据传输模组
- 机架
- 关於本文章系列
电子变速器
昨天结尾的部份提到了无刷马达,然而无刷马达的故事还没有结束。
从昨天提到的内容,我们可以将各部件的关系图画出如下。
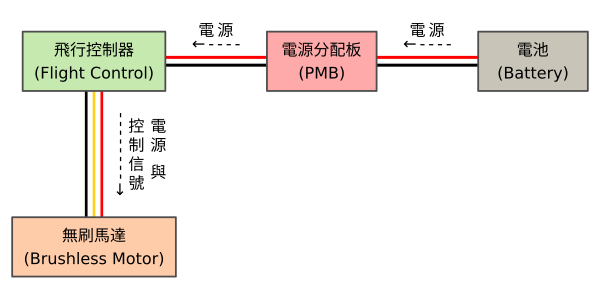
飞行控制器本身功耗不大,只是提供讯号的接收(例如:从其他感测器拿资料)与发送(例如:传送控制信号给无刷马达),因此飞行控制器本身能够承受的电压与电流都不大,从昨天提供的官方使用手册可以观察到工作电压大约是在 5V 左右。反观,无刷马达是高耗电的产品,输入电压可达 12V 、工作时的电流也可达到几十安培,所以如果按照图中这样连接,飞行控制器会无法供给无刷马达足够的能源,甚至还可能导致飞行控制器内部电路烧毁。
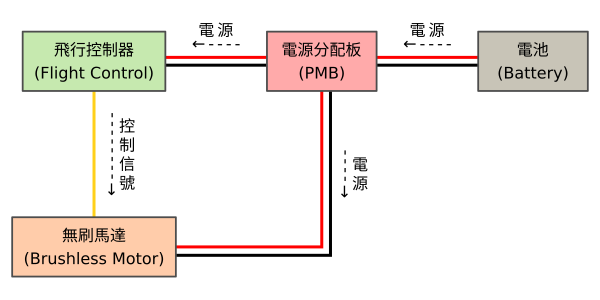
因此我们必须改变接线方式,由飞行控制器负责供应无刷马达讯号,用於控制无刷马达的转动,但是无刷马达的供电不可由飞行控制器负责,而须改由电源分配板那边接过去。
不过,飞行控制器与无刷马达之间的纠葛还没结束!
飞行控制器输出的讯号是单一 PWM 讯号,然而无刷马达却是要接受三相 PWM 讯号,因此两者之间需要转换。
首先需要解释什麽是 PWM 讯号(Pulse Width Modulation , PWM),PWM 其实是数位讯号为了实现跟类比一样的特性而打造的。以我们的无刷马达举例来说,马达会依照供给电压的不同改变转速,假设供给 0V 时马达不旋转,供给 12V 时马达可以达到最快转速。由於我们的电池是 3S 的电池,所以电池在充饱的状况下是 4.2V * 3 = 12.6V,如果直接从电源分配板拉一条电源线给马达,就可以取得 12V 没问题,另外,要供给 0V 给马达也没问题,因为直接接地就好。此时会出现一个问题:我希望马达转速居中,想供给 6V 时该怎麽办?我们的电源分配板上可没有 6V 可以用,也许聪明的读者会说:那就用降压器把 12V 降压成 6V 就好啦!那如果今天我要再略微调降马达转速,因此需要供给 3V 的电压呢?理论上当然可以再加一颗降压器专责 12V 降压成 3V!但是我想你大概也开始想:这样不是办法,因为飞行控制器可能会要求供给无刷马达 0V 至 12V 中任一个数值的电压,总不可能针对每个电压值都装对应的降压器吧?这个问题的解法就是 PWM。
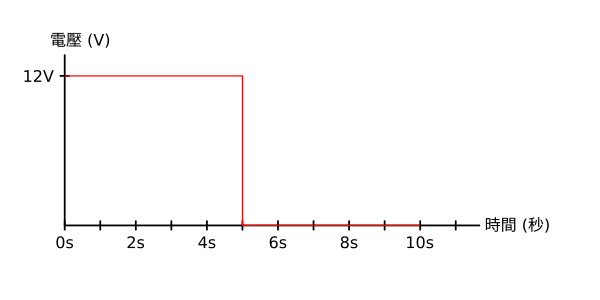
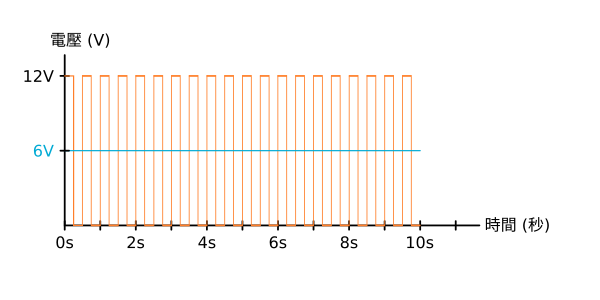
可以先从下图来看,这是一个电压对时间的关系图,在 0~5 秒的时段中,输出电压 12V,在 6~10 秒的时段中,输出电压 0V。
如果我将上图的频率增加呢?
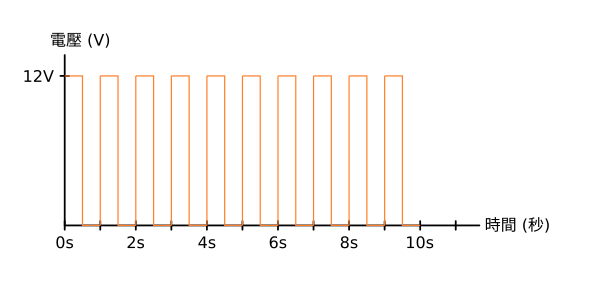
如果我将上图的频率再次增加呢?
因为电本身的特性,所以当频率增加到很大时(其实下图中的频率还不够),实际产生的电压可以视为 12V 与 0V 的平均,也就是下图中的蓝线 6V ,这部份因为与电学的细节有关,所以就不细讲了!简单来说,PWM 就是透过调整电压频率的变化(或直接说快速开关,开就是 12V,关就是 0V)来产生持续的某电压值,这个某电压值可以是介於 0V 到 12V 间的任意数值。
飞行控制器会传送 PWM 控制讯号,藉由电压的改变来变更马达的转速。然而,从上一篇文章中可以观察到马达的输入为三条线,这三条线并非红的对应 12V、黑的对应 0V、黄的对应控制讯号,这三条线是三相控制线,需要轮流为这三条线提供 PWM 讯号才能让马达转动。如果觉得文字说明很混乱,可以参考下图的图解。
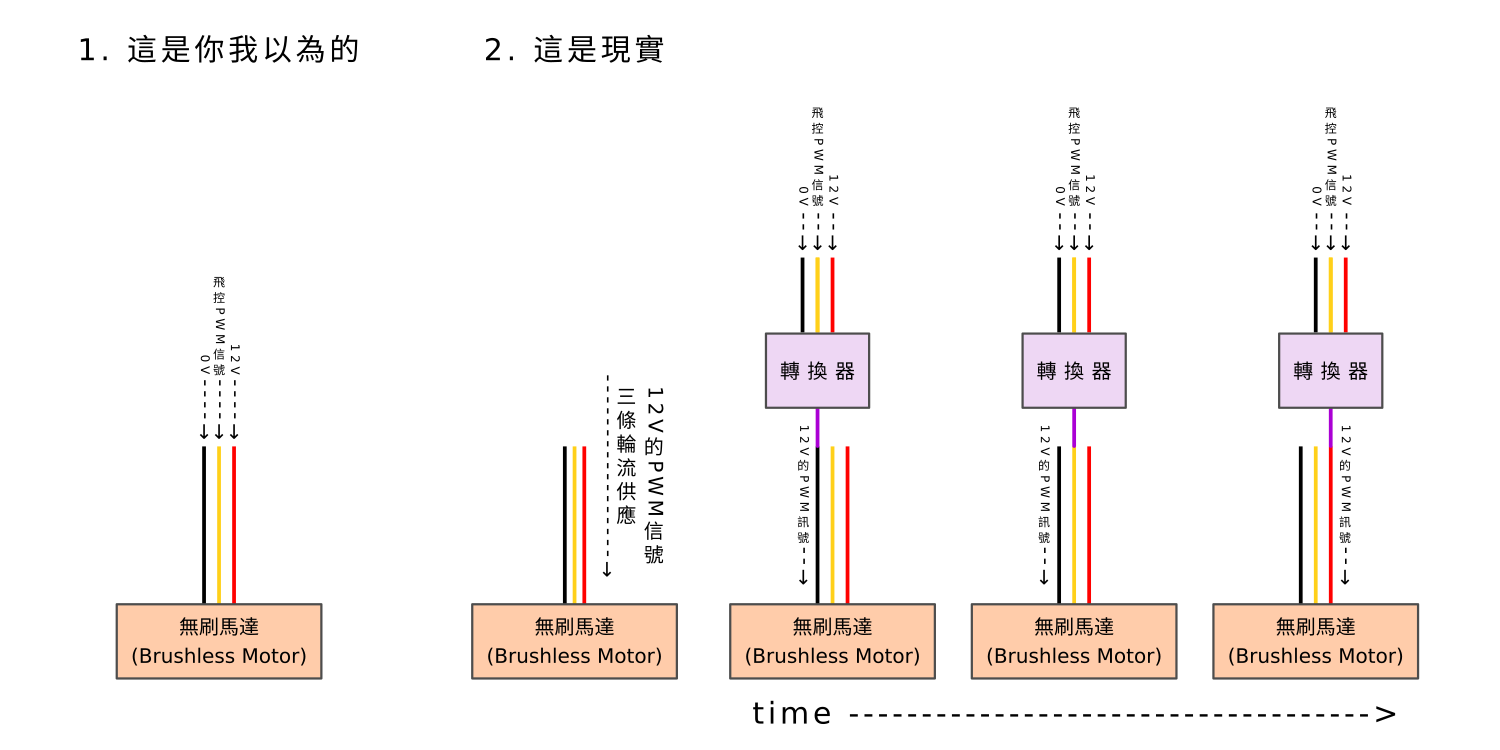
如上图所示,我们须要一个转换器来实现图中展示的功能,因此电子变速器就正式登场了!
电子变速器(Electric Speed Control , ESC)又称电变,能够输入一个直流电源(DC)与一个 PWM 控制讯号,再将其转换成交流电源轮流输出至三条连接至马达的线中。
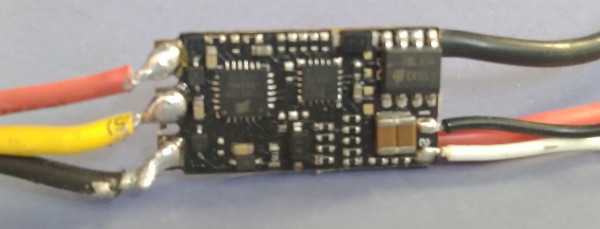
我使用的电变如下图所示,因为无从得知电变的型号,所以只能依照常理来判读各接脚的用途。
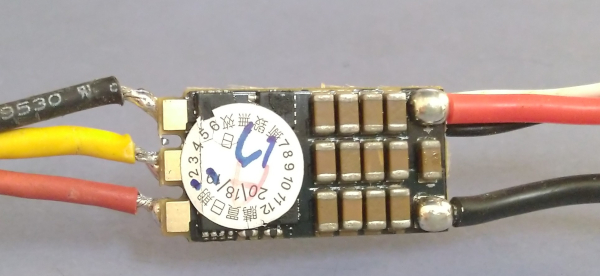
这是电变的另一面。
图中的电流流向是由右至左。右边较粗的红线、黑线是用来连接电源分配板、取得 12V 的电源输入,白线则是连接飞行控制器,用於取得 PWM 控制讯号。左边的部份则是电子变速器的输出,会产生交替的大电压 PWM 讯号,直接连接到马达的三相线、用於驱动马达转动。
以上就是电子变速器的介绍,电子变速器是个必要的部件,他的必要性牵涉到电学以及马达相关的知识,如果有做过 Arduino 与马达搭配相关专案的读者,可能会比较熟悉以上内容。
螺旋桨
看完无刷马达与电子变速器後,紧接着登场的当然就是螺旋桨啦!
我使用的是 ATG 8038 螺旋桨,桨叶片上较光滑、有刻型号的是正面,反之则是背面。
可以观察到螺旋桨有正桨与反桨之分,桨背逆时针转时会产生推力的是正桨、桨背顺时针转会产生推力的是反桨。

遥控器(与接收模组)
接下来要介绍的是遥控器(Remote Controller , RC),遥控器用於发送讯号给无人机,告诉无人机要怎麽飞(例如:上升、下降、前进、後退、旋转、切换飞行模式等)。遥控器细分的话可以拆为遥控器与讯号接收模组,遥控器通常由人拿在手上,由使用者操作遥控器,再由遥控器发送控制讯号,而讯号接收模组则会安装於无人机上,用於接收遥控器的控制讯号,讯号接收模组会将收到的讯号传送至飞行控制器,由飞行控制器再下相关的控制讯号给其他部件(例如:马达)。
之後使用树莓派连接飞行控制器并直接操作无人机的飞行时,建议保留遥控器的角色,以防树莓派突然中断控制讯号(例如:树莓派因某些原因重新开机)而导致无人机失控。无人机失控时还能拿起遥控器手动操作,让无人机安全的降落或返航!
以下是我使用的遥控器,RadioLink AT9S 日本手。

这是遥控器电源打开後的画面,这是已经设定後的结果。

遥控器前方长长的部份是天线(Antenna),用於传送无线控制讯号,遥控器上有许多摇杆、开关与旋钮,之後实际操作时会再详细介绍。值得注意的是,遥控器分为日本手与美国手,差异只在於油门与方向控制的位置互换而已。图中是日本手的遥控器,因此油门(又称 Throttle,控制无人机上升或下降)摇杆在遥控器的右半边,而控制方向的摇杆则在遥控器的左半边。如果是美国手的遥控器,则油门摇杆与控制方向的摇杆位置会互换。
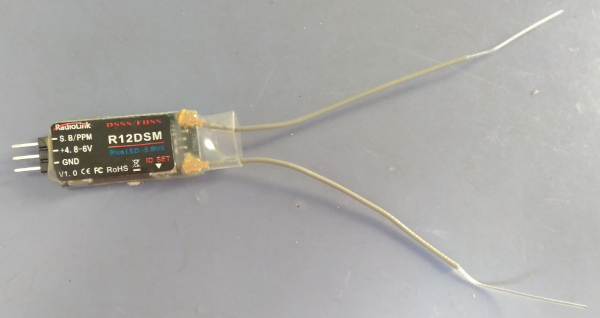
以下是搭配遥控器使用的控制讯号接收模组 RadioLink R12DSM,右边两根长长的是无线讯号接收天线,左边则是用於连接飞行控制器的杜邦针脚。
数据传输模组
数据传输模组通(Telemetry Radio Module , Telemetry / Telem)常简称数传,用於让使用者即时与无人机上的飞行控制器沟通,取得无人机当前的相关资讯,甚至也可以发送控制讯号给飞行控制器用以控制无人机的飞行。数传模组并不是一定要有,只是如果有了会很方便,毕竟无人机一飞起来,能与之连线的东西不多,就剩遥控器与数传,遥控器上的开关按钮很制式,数传相对较有弹性。
以下是我所用的数传模组 Holybro Telemetry Radio V3 。

数传模组通常是两个一对(上图仅是一个数传模组),一个安装於无人机上,并与飞行控制器直接连接,另一个则是留在使用者手上,直接与电脑连接,使用者可以透过电脑上的专用软件与飞行控制器连线,用以取得相关资讯以及发送新指令。
两个数传模组原则上只要讯号发射频率相同(甚至型号相同,如上图是 915MHz 的发射频率),基本上就可以互相通讯,数传模组没有主从之分,因此任选一个数传模组连接到飞行控制器上,另一个连接到使用者手中的电脑就可以通讯。
机架
最後提到的是机架(Frame),以上提到了这麽多部件,需要找个东西把他们凑在一起,毕竟总不可能把无人机上所有的部件都黏到飞行控制器上吧!这就好像一台电脑要有机壳一样,总不会期待硬碟、光碟机、读卡机等设备都黏在主机板上,就可以省下了一个机壳了!
机架的材质我使用的碳纤维(Carbon Fiber),碳纤维相对来说较为坚硬、有一定轫性,能够抵抗外力冲击,重量也没有很重。相较於金属而言,金属有些过於重,还会有吸收太阳热能,进而导致机架上的各部件被加热的危机。塑胶虽然相对轻,但是用久了容易变形,长时间被太阳晒也容易变质脆化。
关於碳纤维的详尽介绍,可以参阅 这个影片 。用来制作无人机骨架的碳纤维,通常会被编织成网状,并且将多层网状的碳纤维压合以增加坚固程度。不过碳纤维也有一个缺点,就是当你摔机之後,碳纤维断掉会产生很多小碎屑,这些碎屑很尖,而且有时候清理不易,有些粉状的碳纤维碎屑还会沾到手上,将你的手「染黑」。
我听起来很了解碳纤维断裂後有多悲剧?当然,我可是摔机常客!
机架的形状也是各式各样,通常可分为两种:X 型与 H 型。
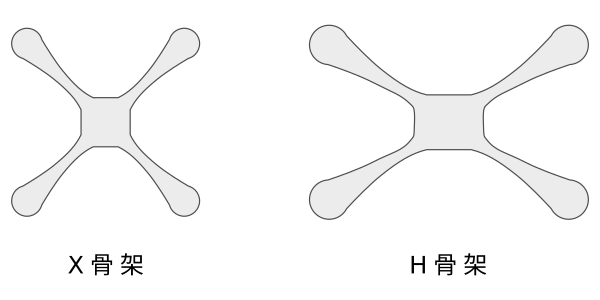
X 型骨架的机架上下、左右均对称,因此呈现漂亮的 X 形,有利於无人机做灵活的飞行表演或是在障碍物多的地方穿梭飞行,不过 X 型骨架中间的部份通常是方形的而且也比较小,所以放置部件的空间有限。H 型骨架通常是较扁的 X 形状,中间的部份通常是长方形的而且也比较宽,所以放置部件的空间较多。
我使用的是 H380 机架,材质是碳纤维,下图仅展示部份组件,重复的组件只放一个。

关於本文章系列
如果对於文章内容有建议、纠错或图源标示不正确的问题,欢迎参考 [机派X] Day 1 尝试与文章作者联络。
想看更多本系列的文章,请连结至 [机派X] Day 1 查看大纲。
Day35 ( 电子元件 ) LED 显示温湿度 ( DHT11 )
LED 显示温湿度 ( DHT11 ) 教学原文参考:LED 显示温湿度 ( DHT11 ) 这篇文...
Day25 Vue 双向绑定 vs 单向绑定
什麽是单向绑定什麽是双向绑定?简单来说一个只有单方面的传送,另一个则是可以来回传,wow讲完了,今天...
Day19 部署 STUN / TURN server
安装 coturn 使用 apt 安装 ❯ sudo apt update ❯ sudo apt i...
Day 22:计算机概论
前言 计算机概论虽然是高中职的学科,但这也是身为工程师的基本常识,没有这些底子我们甚至没有办法跟其他...
Day4 HTML 语法简易介绍(一)
HTML 语法简易介绍 HTML 是 Hypertext Markup Language 的缩写,也...