AutoML NAS - SGAS: Sequential Greedy Architecture Search(上篇)
1 前言
近年来深度学习使用在许多比赛中,但几乎都使用ensemble(集成)的方式或是使用庞大的模型,这有个很严重的问题,那就是成本过高无法落地(除了原本就很昂贵的设备),因此近几年也有许多人设计适用於嵌入式装置的模型,而Neural Architecture Search(NAS)便是解决办法之一,它能自动搜寻模型架构找到较为适合的架构,并且在效能上也能够有一定的表现,甚至有些NAS在训练时也能限制FPS和模型大小等等,如此一来在嵌入式装置也能够轻易地使用并且获得好的效能。
此篇文章要介绍的是Sequential Greedy Architecture Search(SGAS)[1],SGAS是基於gradient descent(梯度下降演算法,GD)来找架构,这里我使用Convolutional neural network(CNN)作为范例 ,除了GS以外还有evolutionary algorithm (演化是演算法, EA)和reinforcement learning(强化学习,RL)等等方式能够找架构。想了解更多可参考AutoML Survey[2]。
2 SGAS贡献
首先简单的先了解SGAS的贡献。
- 使用贪婪的方式进行剪枝。
- 使用三种计算方式来定义剪枝的优先度,分别Edge Importance(重要性)、Selection Certainty(确定性)和Selection Stability(稳定性)三种计算来增加模型训练的稳定性。
3 SGAS演算法
3.1 Cell(Block)
注:假设Cell和Block是相同的东西
在开始进入SGAS时要先知道什麽是Cell(Block),因为SGAS是在找出一个可能较好的Cell(Block)。这里使用Resnet[3]为例,我们常常会听到ResNet18/34/50/101/151...,而後面数字是代表经过了N层的运算层,其中运算层如卷积层和池化层等等,而Cell其实就是将几个运算层组合起来,如下图一(a)为ResNet-38的Cell,由此可知道ResNet-38是使用许多个Cell(a)所堆叠起来的网路,同理可知图一(b)也是一样,除此之外不同的Cell也会得到不同的效能。因此有许多人设计了不同的Cell来提升效能,而这篇论文是使用可微分与可加性来去找出最佳的Cell,如此一来能够因应不同的资料集并且减少人工设计的成本。
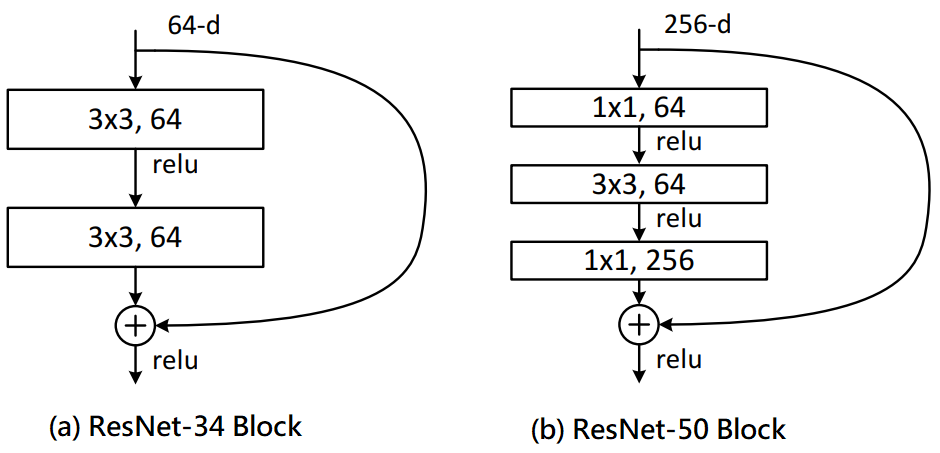
图一,来源[3]。
3.2 SGAS流程
从ResNet上面可以看到每一个箭头代表着一种运算层,而在SGAS中则是先定义N种运算层(3x3卷积层、最大池化层、5x5卷积层...),也就是说第N层到第N+1层从原先只计算一个运算层变为需要计算N个运算层,如图二(a),不同颜色的箭头代表着不同的运算层,而N个运算层会乘上一个对应的权重(训练出来的)做相加。
接着会先经过训练後,在N个运算层中选出一个较为重要的运算层,其余的则忽略,而这就是剪枝,如图二(b),经过Greedy Decision在第0个节点和第1个节点选出蓝色线,再来经过训练後相同的经过Greedy Decision选择要剪枝的节点,如图二(c),反覆此步骤直到每个节点都剪枝完毕,如图二(d)。
简单的例子:假设输入(1, 3, 32, 32)大小的资料。
- ResNet会输出是(1, 64, 32, 32)。
- 未剪枝的SGAS会有N个运算层则会变为[(1, 64, 32, 32), (1, 64, 32, 32)...N],在乘上相对应的权重[0.1, 0.05...N]做加总,所以输出的大小一样是(1, 64, 32, 32)。
- 已剪枝的SGAS只会有一个运算层,所以输出的大小是(1, 64, 32, 32)。
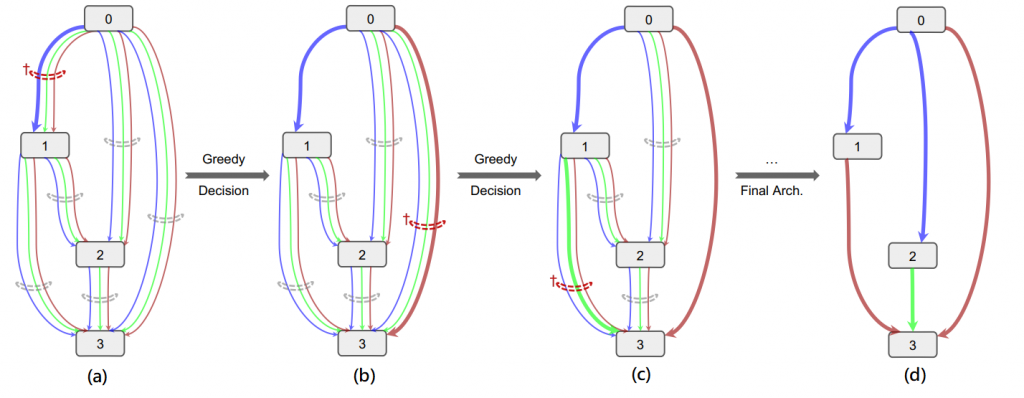
图二,来源[2]。
3.3 SGAS演算法
这里直接附上SGAS演算法,如图三,其中i和j代表着不同的节点,alpha代表运算层的重要度(权重),W代表整体网路的权重,这里与上述的流程是相同的,只是用演算法的形式写出。
- 使用验证集更新A(每一个alpha)。
- 使用训练集更新W。
- 经过Greedy Selection Criterion找出最大值的节点进行剪枝,剪枝过的alpha则不再更新。
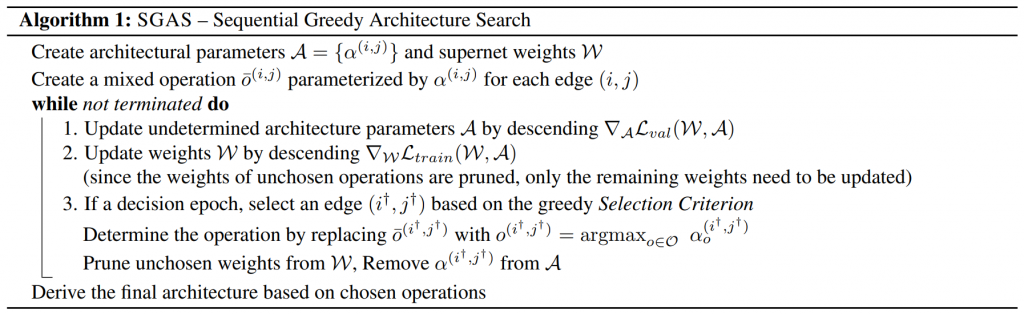
图三,来源[2]。
3.3.1 Greedy Selection Criterion Formula
SGAS主要使用了三个公式作为Greedy Decision的选择标准。
- Edge Importance
第一个公式为计算alpha(i, j)的重要性,其中i、j为不同的节点。上述有提到每一次计算有N个运算层,而其中有一个运算层为non-zero层,也就是说经过non-zero层後的输出等於零,反向传播(偏微分)时的梯度一样为0,因此能够说如果alpha(i, j)的non-zero层的权重较大,代表着此层的重要程度是比较小的。详细公式如公式一。
注:使用exp能将连乘的机率转为相加。
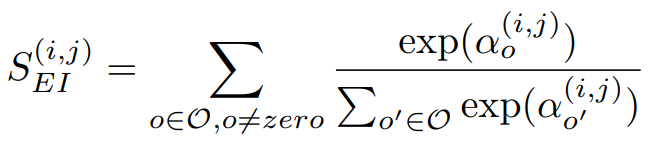
公式一,来源[2]。
-
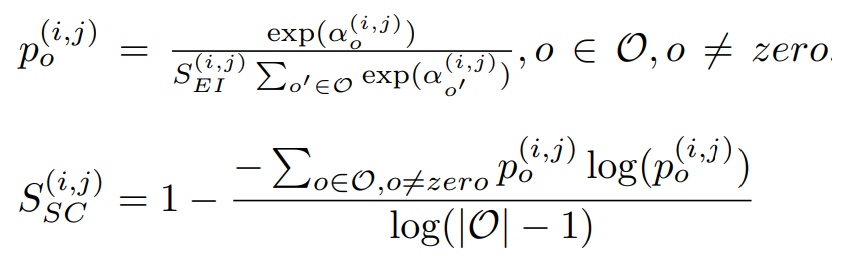
Selection Certainty
第二个公式为计算alpha(i, j)的确定性,其中i、j为不同的节点。公式二则延续公式一,只是多使用entropy来计算平均的确定性。详细公式如公式二。
这里举个简易的例子来看出entropy的特性,其中entropy公式为x*log(x),可以看到越接近1或0的entropy都会比较大,因此能够利用entropy的特性来计算出不确定性(越接近0确定性越大)。而要计算确定性只要加上1即可。
1.机率为0.9的entropy为0.9 * log(0.9) = -0.04,反之确定性=0.96。
2.机率为0.1的entropy为0.1 * log(0.1) = -0.1,反之确定性=0.9。
3.机率为0.5的entropy为0.5 * log(0.1) = -0.15,反之确定性=0.85。
上述的例子可以得知0.5的不确定性较大,可以反应出未收敛或模型产生矛盾等等情况。
注:计算一次极端状况能知道Selection Certainty是补足Edge Importance的不足。
公式二,来源[2]。 -
Selection Stability
第二个公式为计算alpha(i, j)的稳定性,其中i、j为不同的节点。若只考虑公式一和公式二,可以知道两者仅仅只考虑当下的alpha(i, j),这有可能会产生不稳定情形,例如第一次决策时的机率是0.1,第二次决策时的机率是0.9,第三次0.1,第四次0.9,这时就会有不稳定的情况,因此SGAS考虑了T个历史纪录,用来计算彼此的交集,这样能够将稳定度也考虑进去。详细公式如公式三。

公式三,来源[2]。
3.3.2 Greedy Selection Criterion
SGAS使用了上述三个公式做评估,假设都是独立机率则相乘即可获得分数,而分数又分为Cri.1公式四和Cri.2公式五,差别在於有无考虑历史讯息(Selection Stability)。

公式四,来源[2]。

公式五,来源[2]。
4 主要程序码解析
4.1 Network
GitHub位置:/sgas/cnn/model_search.py
其它参数
一般的网路运算层基本上只有一个运算层,如3x3卷积层、5x5卷积层、3x3空洞卷积层....,而SGAS运算层定义为包含八种运算层,如下。
PRIMITIVES = [
'none',
'max_pool_3x3',
'avg_pool_3x3',
'skip_connect',
'sep_conv_3x3',
'sep_conv_5x5',
'dil_conv_3x3',
'dil_conv_5x5'
]
主要函数
MixedOp:当无选择的索引(未被剪枝)则计算八种运算层乘上权重的合,若有选择的索引(已剪枝)则选择该层运算做为输出。
class MixedOp(nn.Module):
def forward(self, x, weights, selected_idx=None):
if selected_idx is None:
return sum(w * op(x) for w, op in zip(weights, self._ops))
else: # unchosen operations are pruned
return self._ops[selected_idx](x)
Cell:SGAS用两个Node做为输入,分别是前一个Cell的输出(s0),现在Cell的输出(s1),这种想法其实有点类似ResNet和DenseNet,甚至未来可以尝试使用CSPNet的想法来减少计算量,而这里的**_steps表示操作次数,可以当作是Cell深度的上限(预设4),每计算一次就可以得到更高阶的特徵,并且会将输出加入states list内以供下次操作使用,这里其实也隐含着类似ResNet和DenseNet**的想法,因为下一层还能够使用上一层的输入进行运算,可以让网路自行决定要使用低阶特徵或是高阶特徵。
注:这里特别的地方是states list的数量随着增加,但输出的数量是不变的,因为会将所有states list经过MixedOp的输出进行相加,这想法也就是特徵融合。
class Cell(nn.Module):
def forward(self, s0, s1, weights, selected_idxs=None):
s0 = self.preprocess0(s0)
s1 = self.preprocess1(s1)
states = [s0, s1]
offset = 0
for i in range(self._steps):
o_list = []
for j, h in enumerate(states):
if selected_idxs[offset + j] == -1: # undecided mix edges
o = self._ops[offset + j](h, weights[offset + j])
o_list.append(o)
elif selected_idxs[offset + j] == PRIMITIVES.index('none'): # pruned edges
continue
else: # decided discrete edges
o = self._ops[offset + j](h, None, selected_idxs[offset + j])
o_list.append(o)
s = sum(o_list)
offset += len(states)
states.append(s)
return torch.cat(states[-self._multiplier:], dim=1)
Network _initialize_alphas:初始化每一个Cell内的运算层权重,与上述Cell回圈相同,而产生乱数的大小是运算层种类大小(8种运算),而这里较为特别的地方是,分为alphas_normal和alphas_reduce权重,alphas_normal代表无需下采样的Cell,而alphas_reduce代表需要下采样的Cell,(部份研究)会分为两个区块的原因可能是下采样通常会设定不同的stride或池化层等等,因此这操作与无须下采样的Cell是稍微不同的,所以会分为两个区块进行。
Network forward:会先计算alphas权重,再呼叫Cell进行计算,与一般网路差别在於权重。
Network check_edges:在剪枝完後呼叫,会限制每一次操作(深度),若以有max_num_edges个已决策的节点则其余节点可以忽略。这个函数在限制计算复杂度,而当限制越宽松(max_num_edges越大)则运算量越大与训练时间越久。
class Network(nn.Module):
def _initialize_alphas(self):
k = sum(1 for i in range(self._steps) for n in range(2 + i))
num_ops = len(PRIMITIVES)
self.alphas_normal = []
self.alphas_reduce = []
for i in range(self._steps):
for n in range(2 + i):
self.alphas_normal.append(Variable(1e-3 * torch.randn(num_ops).cuda(), requires_grad=True))
self.alphas_reduce.append(Variable(1e-3 * torch.randn(num_ops).cuda(), requires_grad=True))
self._arch_parameters = [
self.alphas_normal,
self.alphas_reduce,
]
def forward(self, input):
s0 = s1 = self.stem(input)
for i, cell in enumerate(self.cells):
if cell.reduction:
selected_idxs = self.reduce_selected_idxs
alphas = self.alphas_reduce
else:
selected_idxs = self.normal_selected_idxs
alphas = self.alphas_normal
weights = []
n = 2
start = 0
for _ in range(self._steps):
end = start + n
for j in range(start, end):
weights.append(F.softmax(alphas[j], dim=-1))
start = end
n += 1
s0, s1 = s1, cell(s0, s1, weights, selected_idxs)
out = self.global_pooling(s1)
logits = self.classifier(out.view(out.size(0), -1))
return logits
def check_edges(self, flags, selected_idxs, reduction=False):
n = 2
max_num_edges = 2
start = 0
for i in range(self._steps):
end = start + n
num_selected_edges = torch.sum(1 - flags[start:end].int())
if num_selected_edges >= max_num_edges:
for j in range(start, end):
if flags[j]:
flags[j] = False
selected_idxs[j] = PRIMITIVES.index('none') # pruned edges
if reduction:
self.alphas_reduce[j].requires_grad = False
else:
self.alphas_normal[j].requires_grad = False
else:
pass
start = end
n += 1
return flags, selected_idxs
4.2 Architect
GitHub位置:/sgas/cnn/architect.py
Architect有使用到unrolled来控制是否要添加train data的hessian矩阵(梯度的方向)到优化器内,而这并不是该论文重点(预设false,其它dataset训练也无使用),因此就先略过,有兴趣可找相关文献观看。
主要函数
使用validation data更新未剪枝的的alphas权重。(神经网路无更新)
class Architect(object):
def _backward_step(self, input_valid, target_valid):
loss = self.model._loss(input_valid, target_valid)
loss.backward()
4.3 Train
GitHub位置:/sgas/cnn/train_search.py
现在知道主要的Network架构也知道验证更新参数时使用的是Architect,接着就是greedy decision的算法,这里就按照上述所讲的演算法和公式一步一步的讲解。
1.train
训练所对应的演算法就是1.使用validation data来更新alpha和2.使用train data来更新weights。

参数:
train_queue:train dataloader(Pytorch Class)
valid_queue:validation dataloader(Pytorch Class)
model:train model
architect:class of update alpha
input:train data
target:train target
input_search:validation data
target_search:validation target
def train(train_queue, valid_queue, model, architect, criterion, optimizer, lr, epoch):
...
# Algorithm 1. Update undetermined architecture parameters(only alpha)
architect.step(input, target, input_search, target_search, lr, optimizer, unrolled=args.unrolled)
# Algorithm 2. Update weights W
optimizer.zero_grad()
logits = model(input)
loss = criterion(logits, target)
...
2.edge_decision
注解对应到上述的公式1~5。演算法对应到3.剪枝,特别的是剪枝完还会使用model.check_edges检查已剪枝数量,以用来决定该层是否还需要剪枝(限制剪枝和运算量)。

参数:
args.use_history:用来决定要不要使用历史资料。
args.warmup_dec_epoch:能当做预训练(不做剪枝)。
args.decision_freq:剪枝频率。
candidate_flags:节点是否剪枝的标记。
score:将评估的标准经过正规化[0,1]相乘。
selected_edge_idx:取得最大分数的索引(贪婪算法)。
selected_op_idx:取得selected_edge_idx运算层机率最大的索引(贪婪算法),因为前面忽略non-zero层所以这里index要+1转回原本运算层的index。
def edge_decision(type, alphas, selected_idxs, candidate_flags, probs_history, epoch, model, args):
mat = F.softmax(torch.stack(alphas, dim=0), dim=-1).detach()
# Formula 1
importance = torch.sum(mat[:, 1:], dim=-1)
# Formula 2
probs = mat[:, 1:] / importance[:, None]
entropy = cate.Categorical(probs=probs).entropy() / math.log(probs.size()[1])
if args.use_history: # SGAS Cri.2
# Formula 3
histogram_inter = histogram_average(probs_history, probs)
probs_history.append(probs)
if (len(probs_history) > args.history_size):
probs_history.pop(0)
# Formula 5
score = utils.normalize(importance) * utils.normalize(
1 - entropy) * utils.normalize(histogram_inter)
else: # SGAS Cri.1
# Formula 4
score = utils.normalize(importance) * utils.normalize(1 - entropy)
if torch.sum(candidate_flags.int()) > 0 and \
epoch >= args.warmup_dec_epoch and \
(epoch - args.warmup_dec_epoch) % args.decision_freq == 0:
masked_score = torch.min(score,(2 * candidate_flags.float() - 1) * np.inf)
selected_edge_idx = torch.argmax(masked_score)
selected_op_idx = torch.argmax(probs[selected_edge_idx]) + 1 # add 1 since none op
selected_idxs[selected_edge_idx] = selected_op_idx
candidate_flags[selected_edge_idx] = False
alphas[selected_edge_idx].requires_grad = False
if type == 'normal':
reduction = False
elif type == 'reduce':
reduction = True
else:
raise Exception('Unknown Cell Type')
candidate_flags, selected_idxs = model.check_edges(candidate_flags,selected_idxs,reduction=reduction)
print(type + "_candidate_flags {}".format(candidate_flags))
score_image(type, score, epoch)
return True, selected_idxs, candidate_flags
else:
print(type + "_candidate_flags {}".format(candidate_flags))
score_image(type, score, epoch)
return False, selected_idxs, candidate_flags
5. 结论
SGAS在NAS当中训练速度是相当快的,而这次只运行CNN,资料集使用Cifar-10和MNIST,但一般我们遇到的资料可能不是CNN,而SGAS也考虑的了这点,因此还能用於GCN等等上(其实满多都能用在不同地方),另外如果有时间会在打上一篇来讲解如何用在Kaggle的铁达尼号或房价预测,并且使用sklearn-AutoML来进行比较,感觉上AutoML在节省人力与实用性算是相当高的,希望未来有机会能够在工作场所发挥。
有任何问题或笔误欢迎留言
6. 程序码
修改後原始码:jupyter notebook code
修改後原始码:Github
论文原始码:SGAS Github
7. 参考文献
[1] Li, G., Qian, G., Delgadillo, I.C., M¨uller, M., Thabet, A., Ghanem, B.: Sgas: Sequential greedy architecture search. In: Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition (2020).
[2] X. He, K. Zhao, and X. Chu, “Automl: A survey of the state-of-the-art,” arXiv preprint arXiv:1908.00709 (2019).
[3] K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learning for image recognition. In CVPR, 2016.
[Day 29] 还在吵架的 subgrid
Grid 与 subgrid subgrid 是一种很奇妙的跨维度设定,在 w3c 当中有详细解释。...
Day 25:Ansible Playbook
昨天有成功使用 Ansible 执行一个 echo 印出东西了,这在 Ansible 里面称作 ad...
【Day 26】- 分析卫生福利部疾病管制署(CDC)官网并取得确诊者 API,并用小程序及时取得官方确诊者数量(实战分析网站向外请求 API 加快爬虫节奏)
前情提要 昨天实战了用 Python 向猫咪图片的 API 请求。使用者可以输入一个数字,让程序可以...
每日挑战,从Javascript面试题目了解一些你可能忽略的概念 - Day14
tags: ItIron2021 Javascript 前言 作者发烧中,但文章还是得发? 昨天的主...
Day13 用磁碟机播放唱片
上次在研究 CC: Tweaked 电脑磁碟机的时候 在 /rom/apis/disk.lua 发现...