Day 29 - ROS 树莓派光达履带小车实作 (3)
昨天把lidar配置完成,并且准备好做SLAM的工具,但还有一个最重要的功能就是,让车子动起来~~
所以今天来写如何控车吧!
同事给的img里面有众多的程序,其实我们此次会用的部份有两个
1.rikirobot/bringup.launch
2.teleop_twist_keyboard/teleop_twist_keyboard.py
首先我们要先能有与机器沟通的远端介面,通常方便的文字使用者介面为SSH
ssh <username>@<ip address>
我们购得的履带小车
username:clbrobot
password:123456
连入以後我们开启一个脚本
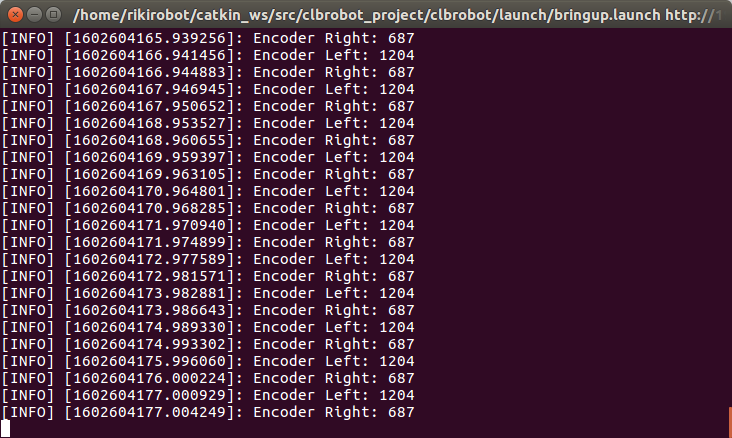
roslaunch clbrobot bringup.launch
主要是开启其中的serial driver,用来聆听/cmd_vel命令并透过serial port控制马达
一个执行档
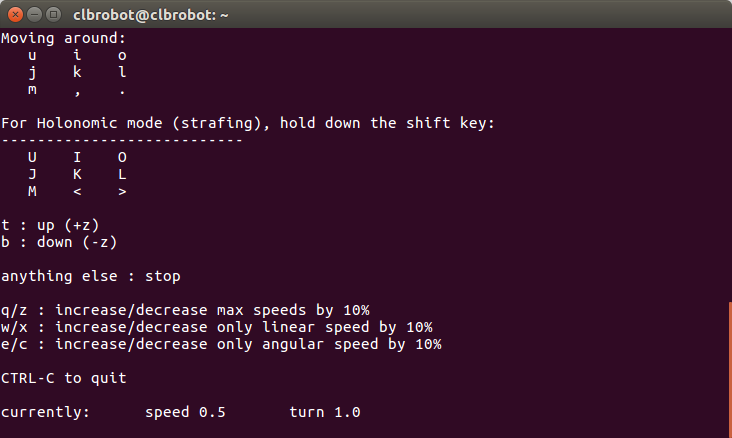
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
用来监听键盘事件
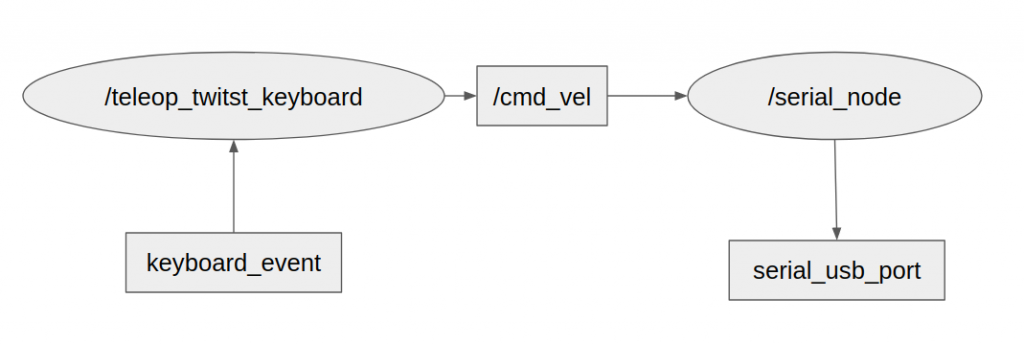
用图来描述整个做动的流程

Reference
https://www.twblogs.net/a/5b99e0ae2b71773ebacd9be7
>>: 【零基础成为 AI 解梦大师秘笈】Day28 - 周易解梦之人工智慧(9)
[Angular] Day30. Angular Module(一)
在 Angular 中应用程序是模块化的,Angular 有自己的模块化系统称为 NgModule,...
Day 7 - Maximum Subarray
大家好,我是毛毛。ヾ(´∀ ˋ)ノ 废话不多说开始今天的解题Day~ 53. Maximum Sub...
自动化 End-End 测试 Nightwatch.js 之踩雷笔记:上传档案II
如果上传档案不想使用 preload 档案,也不想用下载的方式,其实可以上传档案至 selenium...
Day 0x19 - odoo addons 永丰金流开发(Part 1 - 预期目标)
0x1 Odoo? 这是什麽? 我第一次接触也是因为工作需求而学习,蛮强大的一套开源ERP系统,这里...
【Day6】如何检查型别
前面提到「变数本身没有型别问题,变数带的值才有型别资讯」,所以要判断型别,当然是去检查变数所带的值...