20. STM32- MEGA2560 MCP2515 & STM32 CANBus通讯
前几篇有关於CANBus的文章都是利用环回模式去做测试~这一篇会透过Arduino+MCP2515与STM32完成CANBus通讯~
接线
- MEGA2560 & MCP2515
| MEGA2560 | MCP2515 |
|---|---|
| D52 | SCK |
| D53 | CS |
| D50 | MISO |
| D51 | MOSI |
| 5V | VCC |
| GND | GND |
- MCP2515 & STM32
| MCP2515 | STM32 L476RG |
|---|---|
| CAN H | PA12 |
| CAN L | PA11 |
Arduino
这部分有已经写好的库可以使用,我是使用连结 这个库来完成的
这边要注意MCP2515的Baud Rate设定,这边设定是8MHZ选择125k bit/s
#include <SPI.h>
#include <mcp2515.h>
struct can_frame canMsg;
struct can_frame canMsg1;
MCP2515 mcp2515(53); //CSS
void setup() {
canMsg1.can_id = 0x1876AC23 | CAN_EFF_FLAG;
canMsg1.can_dlc = 8;
canMsg1.data[0] = 0x05;
canMsg1.data[1] = 0x06;
canMsg1.data[2] = 0x07;
canMsg1.data[3] = 0x08;
canMsg1.data[4] = 0x09;
canMsg1.data[5] = 0x0A;
canMsg1.data[6] = 0x0B;
canMsg1.data[7] = 0x0C;
while (!Serial);
Serial.begin(115200);
mcp2515.reset();
mcp2515.setBitrate(CAN_125KBPS,MCP_8MHZ);
//mcp2515.setLoopbackMode();
mcp2515.setNormalMode();
Serial.println("********MCP2515&STM32_CAN_Test*********");
Serial.println("********Send Message*********");
mcp2515.sendMessage(&canMsg1);
Serial.print(canMsg1.can_id, HEX);
Serial.print(" ");
Serial.print(canMsg1.can_dlc, HEX);
Serial.print(" ");
for (int i = 0; i<canMsg1.can_dlc; i++)
{
Serial.print(canMsg1.data[i],HEX);
Serial.print(" ");
}
Serial.println();
delay(100);
}
void loop() {
//mcp2515.sendMessage(&canMsg1);
//delay(100);
if (mcp2515.readMessage(&canMsg) == MCP2515::ERROR_OK)
{
Serial.print(canMsg.can_id, HEX);
Serial.print(" ");
Serial.print(canMsg.can_dlc, HEX);
Serial.print(" ");
for (int i = 0; i<canMsg.can_dlc; i++)
{ // print the data
Serial.print(canMsg.data[i],HEX);
Serial.print(" ");
}
Serial.println();
delay(100);
mcp2515.sendMessage(&canMsg1);
Serial.print(canMsg1.can_id, HEX);
Serial.print(" ");
Serial.print(canMsg1.can_dlc, HEX);
Serial.print(" ");
for (int i = 0; i<canMsg1.can_dlc; i++)
{ // print the data
Serial.print(canMsg1.data[i],HEX);
Serial.print(" ");
}
Serial.println();
delay(100);
}
}
IOC设置
先确认一下系统时钟是多少 後续再设定TQ与Baud Rate时才不会出错~
在这边我系统时钟是16Mhz
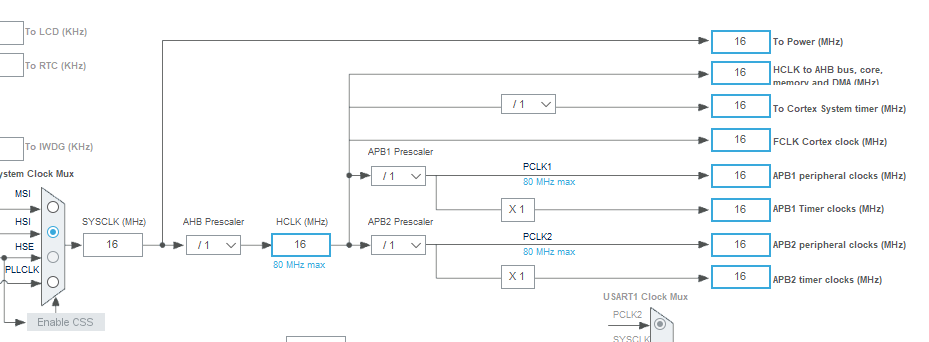
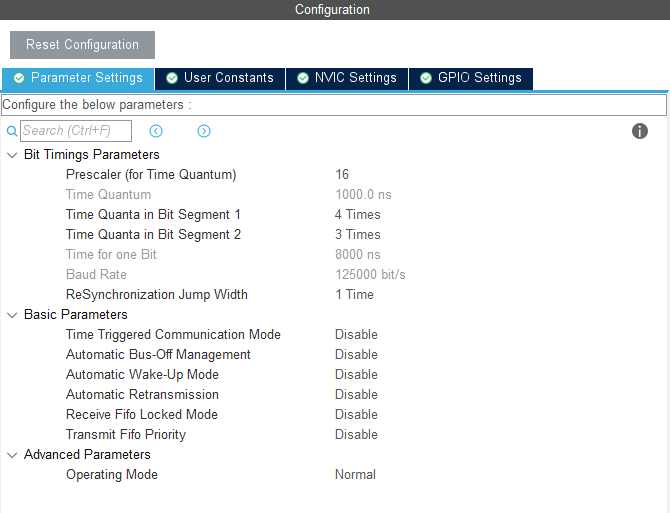
接着来看看CAN的设置
PSC的部分设定为16 TQ会等於1000ns
BS1 选择4 BS2选择3 采样点会落在62.5%
最後Baud Rate会等於125k bit/s (这边要与另一端设备相同)
全域变数宣告
uint8_t TxBuffer[8] = {0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88};
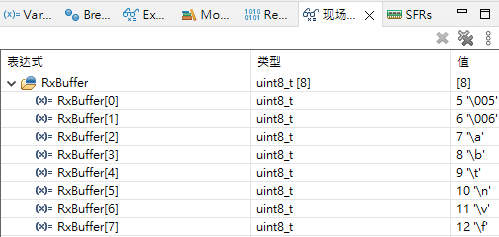
uint8_t RxBuffer[8];
CAN_TxHeaderTypeDef TxHeader;
CAN_RxHeaderTypeDef RxHeader;
uint32_t TxMailBox;
接收中断回调函数
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO0, &RxHeader, RxBuffer);
}
设置Filter模式 这边我选择LIST也就是所有ID必须完全相符才会接收
void ConfigFliter(void)
{
CAN_FilterTypeDef CAN1Filter;
CAN1Filter.FilterActivation = CAN_FILTER_ENABLE;
CAN1Filter.FilterFIFOAssignment = CAN_RX_FIFO0;
CAN1Filter.FilterMode = CAN_FILTERMODE_IDLIST;
CAN1Filter.FilterScale = CAN_FILTERSCALE_32BIT;
CAN1Filter.FilterBank = 0;
CAN1Filter.FilterIdHigh = ((0x1876AC23<<3)>>16) & 0xffff;
CAN1Filter.FilterIdLow =((0x1876AC23<<3)& 0xffff) | CAN_ID_EXT;
CAN1Filter.SlaveStartFilterBank = 0;
HAL_CAN_ConfigFilter(&hcan1, &CAN1Filter);
}
main
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART2_UART_Init();
MX_CAN1_Init();
/* USER CODE BEGIN 2 */
ConfigFliter();
HAL_CAN_Start(&hcan1);
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING);
TxHeader.DLC =8;
TxHeader.ExtId = 0x08C53451;
TxHeader.IDE = CAN_ID_EXT;
TxHeader.RTR = CAN_RTR_DATA;
TxHeader.TransmitGlobalTime = DISABLE;
HAL_CAN_AddTxMessage(&hcan1, &TxHeader, TxBuffer, &TxMailBox);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
测试结果
这边我先将MCP2515做环回测试确定传送与接收正常後才与STM32对接做测试~
下图为Arduino & MCP2515 LoopBack 测试画面
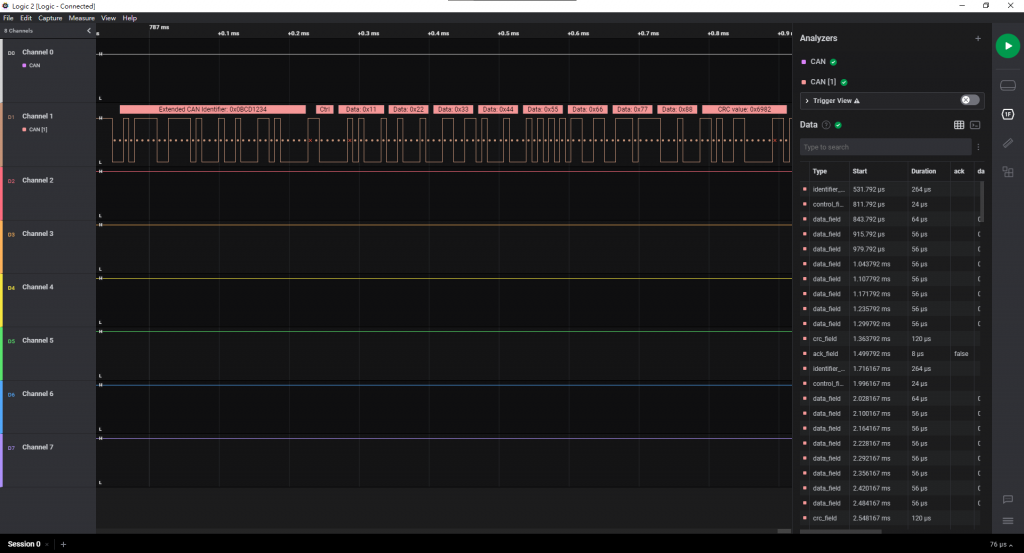
Arduino传送端
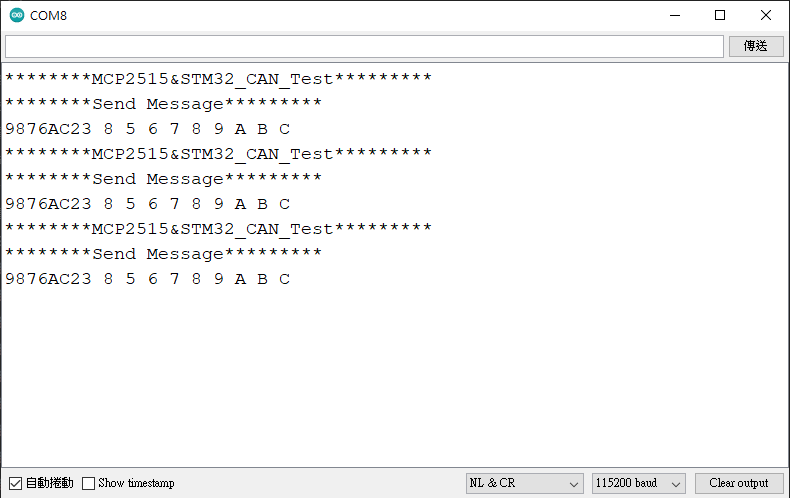
STM32所接收到的资料
由於我只有一块STM32,所以用MCP2515来当作另一端设备,手边有两块的话可以直接将CANRX与另一端TX相连做测试就可以了~
<<: 在Heroku一键架好Ubuntu,并用浏览器配noVNC连进去
>>: 新书上市 : Azure 云端运算实战 : 使用 PaaS 服务快速打造交谈式聊天机器人
第一章 之一 苦苦思索网域与购买
第一小节 Godaddy网域费用 对於购买网域一开始就已经打定主意想来个类似整套包含SSL与空间,於...
如何设计SQL 表格来提升查询非过往历史资料的效能?
个人正在写一个场地租借系统, 提前开放2周给人预约, 租借的过期纪录要保留起来作系统或规则改善研究,...
[2021铁人赛 Day20] General Skills 17
今天我们稍微调动一下顺序,先解 General Skills 系列的最後一题, 因为跟昨天的题目算...
Day 02 - 环境安装(中) Docker & MySQL
作业系统建置完成後就可以安装资料库环境,这里的做法是让MySQL 运行在Docker 上,原因只是未...
Day 28 / DL x RL / RL 不只会打电动?
RL 比较知名的应用场合和研究成果大部分都分布於游戏、自驾车、和机器人领域。事实上 RL 可以有非常...