[机派X] Day 11 - 让我们拆了这台无人机
引言
今天是机派X系列文章的第十一天。
昨天很寒酸的简介无人机,今天会从单一零件的角度一一将无人机的结构拆解说明。
本篇大纲:
- 引言
- 电池
- 电源分配版
- 飞行控制器(与 GPS)
- 无刷马达
- 关於本文章系列
昨天比较偷懒,内容超级少,今天认真一点,详细介绍无人机上的各组件。无人机上能配备的组件很多,以下仅以必要或常见的部份来介绍,之後也会用这些组件组出一台可能能动的无人机。由於相关零组件众多,因此会分成两篇来介绍。
Note :
图片中的组件看起来可能旧旧的,因为那是我们实验室使用已久的无人机,之前坠机後就被拆解,这次我就直接拿他来当教材了!另外,有些零组件因为没有标示型号,因此无法查询硬体规格书,我只能猜测接脚(pin)的用途,可能没办法给出 100% 正确的答案。
电池
一台无人机一定需要一颗好电池(Battery),电池为无人机上的各组件提供电源(Power)。由於无人机上组件中,最耗电的莫过於无刷马达了,一颗无刷马达在无人机飞行时可耗的电流高达几十安培,因此选择电池时,需要搭配无刷马达的型号(不同型号的功率不同)选择合适的电池。
这边我们使用的是 ELL MAX 3S 5800mAh 25C 的锂聚合物(LiPo)电池。

这边简单介绍一下锂电池:
基本上每颗(cell)电池工作电压都是 3.7V,电池充饱电压是 4.2V,通常放电到 3.0V 就算过放。对於无人机飞行来说,如果单颗电池达到 3.4V 就建议不要飞行,而应该拿去充电了。另外,锂电池、长时间不用(例如:一个月以上)应该要适当的放电至 3.6V,而不要维持在充饱的 4.2V 保存。若电池膨胀後,则应该丢弃,不要再使用!
我们的 ELL MAX 3S 5800mAh 25C 其实是将三个一颗(one cell)的锂聚合物电池做串连(Series)而得,所以称为 3S,因而工作电压是 3.7V * 3 = 11.1V,其他部份也是以此类推。而电池的总容量是 58000mAh,电池容量越大,无人机的续航时间越长,通常会根据无刷马达的功率以及需要的飞行时间来选择电池容量,我们这颗电池下可以让我这台无人机飞行半小时。最後谈到电池规格中的 25C,25C 指的是电池单位时间最大可释放自身容量的 25 倍电流,这个数值也是要依照无刷马达的功率来选择,因为如果电池单位时间能供给的最大电流无法满足无刷马达,则可能导致无人机无法飞起来,或是飞到一半坠机,我们选用的这颗电池是 5800mAh 25C 也就是说单位时间最大可释放 5800 * 25mA 的电流(也就是 145A)。

电源分配版
电源分配版又称电源管理版(Power Management Board , PMB)是用来将电池供给的电力分送至其他部件的控制板。
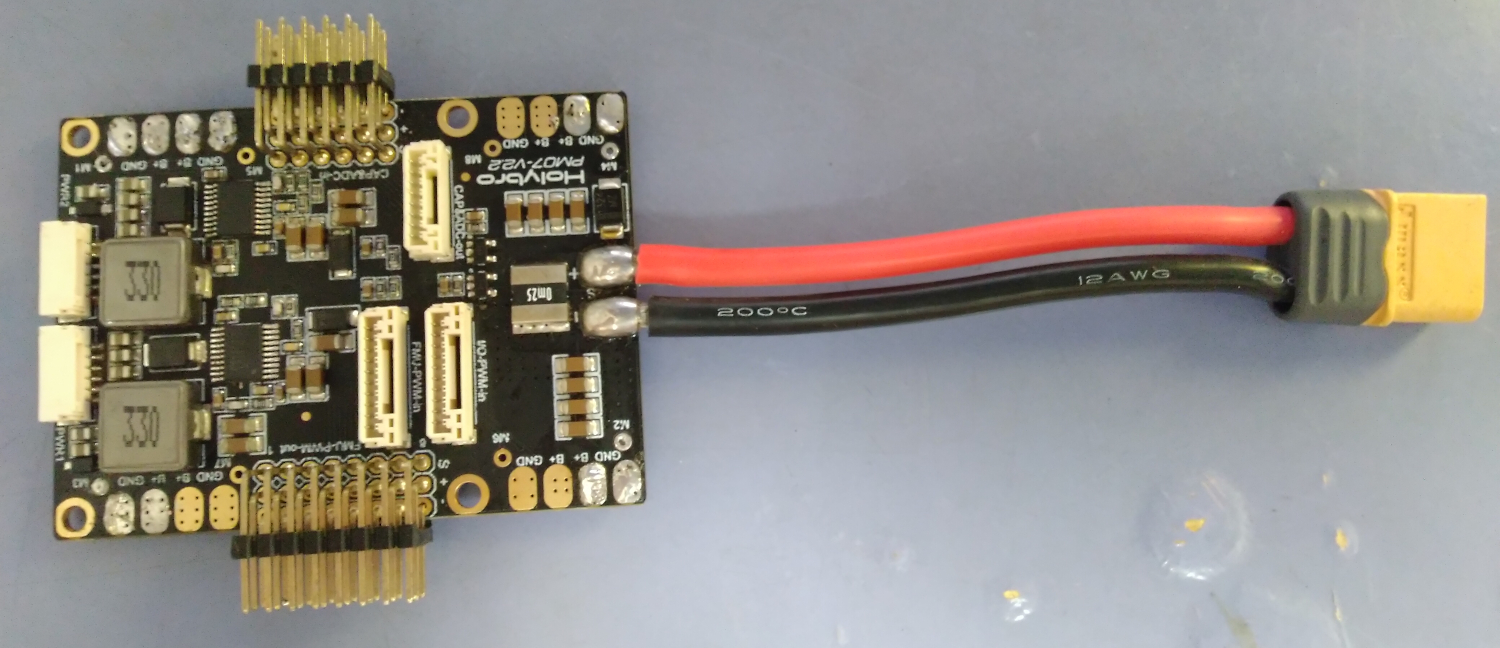
我使用的是 Holybro PM07-V2.2 型号的电源分配版。
以下是电源分配版的正面。
以下是电源分配版的背面。
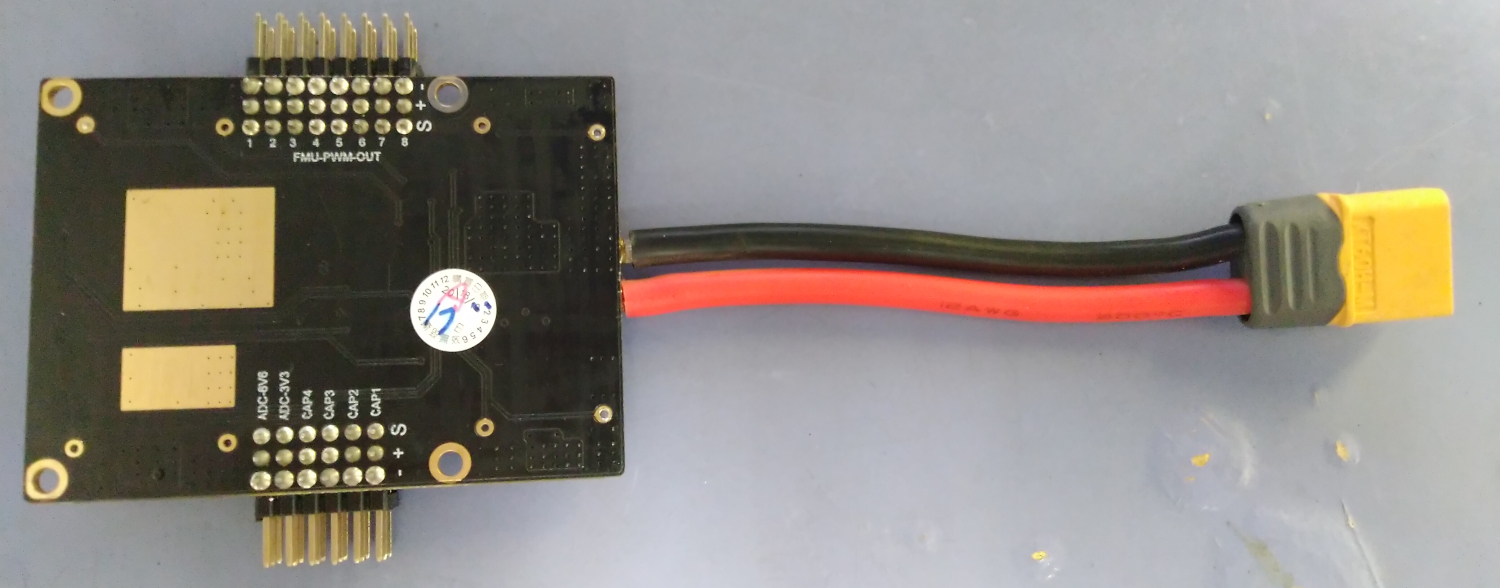
应该很明显可以看出焊接上去的那条线是连接到电池的,那边是整个电源分配版的电源输入,接下来电源分配版会再将电源输出至板子正面的对应接口,只需要将对应的元件按照板上标示的接口连接(或焊接)就可以了。
详细各接口的用途以及规格,可以参考本板官方提供的 使用手册 。
飞行控制器(与 GPS)
如果说 CPU 是一台电脑的核心运算担当,那飞行控制器就是无人机的飞行决策担当。飞行控制器(Flight Control)通常会搭配 GPS 模组(GPS module)一同使用。
飞行控制器上布满许多接口,无人机上的所有部件都会连接到飞行控制器上,感测器的资料能协助飞行控制器取得当前的环境与无人机所在的位置,飞行控制器会再发送相对应的控制讯号控制马达的转动,如此一来便能掌控整个无人机的飞行。此外,飞行控制器内有加速度仪、磁力计、气压计等精密感测器(Sensor),这些感测器也能为无人机的飞行提供许多有用的资讯。
以下是我使用的 PixHawk 4 标准版的图片。
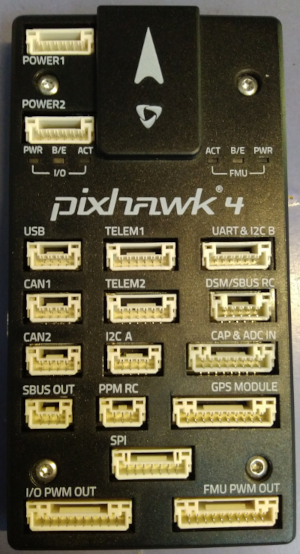
从左边看。

从右边看。

详细资讯可以从 PixHawk 官网中查询 相关文件 ,这些文件至关重要,之後组装无人机时,会需要参考文件来连接与设定各部件。
而这张则是 GPS 。

还是 GPS 。

GPS 中间的支撑柱是碳纤维材质,用於将 GPS 模组架高以防受到周边其他电子装置的干扰(例如:无刷马达),而影响 GPS 讯号的接收。
GPS 本体只有上面那颗香菇头,香菇头中还配备了陀螺仪等设备,GPS 模组会直接连接到飞行控制器上,直接将资料交给飞行控制器处理。
无刷马达
接下来则是无刷马达(Brushless Motor),在前面已经提到多次,无刷马达能够控制无人机的飞行,例如:上升、下降,透过改变不同马达的旋转方向,还能让无人机转弯。
以下是本次使用的 SDMODEL A2212 - 1400KV 无刷马达。

从底部看可以观察到内部线圈以及外围的磁铁。

SDMODEL A2212 - 1400KV 是外转子马达,也就是说马达转动时,是外部那层在转,如果有使用过玩具车的小马达,通常都是内转子马达,转动的都是内轴。而挑选一个好马达首先要了解并非转速越快的马达越好,因为通常马达分两种:高转速但是低扭力、低转速但是高扭力。无人机需要的是高扭力,透过扭力带动无人机飞行,而外转子马达通常都是具备高扭力低转速的型号,详细资讯可以参考 这篇文章 。如果你还是很疑惑,不明白转速跟扭力的不同,我可以举个简单的例子:一个高转速低扭力的马达虽然转的快,但是如果我的手握住马达的转子,则转子就无法再轻易转动,因为这颗马达扭力小;反之,一个低转速高扭力的马达虽然转的慢,但是如果我尝试用手握住马达的转子,则转子较不容易被我控制,而因此停止转动,因为这颗马达扭力大。从以上这段例子可以知道,当无人机的马达开始旋转时,你应该 远 离 它 !尤其是当马达装上螺旋桨後,即便螺旋桨是塑胶的,还是能够轻易将你刮伤。
听起来觉得我很了解?当然,我的手被螺旋桨刮过,所以我知道,基本上很痛、会流血的那种,事後还有可能留下疤痕,不过倒不至於送医那麽夸张。
我使用的 SDMODEL A2212 - 1400KV 具有 1400KV,KV 是指:每增加马达 1V 电压的电源供应,马达每分钟能再多转几圈。以 1400KV 来说,给予马达 1V 的电压转速可以达到 1400rpm(Rotate per Minute , RPM),给予马达 2V 的电压转速可以达到 2800rpm 。要选择多少 KV 的马达会影响到要消耗多少电流、无人机的总负重限制、螺旋桨的大小等,因此挑选时要谨慎。
关於本文章系列
如果对於文章内容有建议、纠错或图源标示不正确的问题,欢迎参考 [机派X] Day 1 尝试与文章作者联络。
想看更多本系列的文章,请连结至 [机派X] Day 1 查看大纲。
人机结合之学习模式
人的科技文明发展始终来自於人性 在未来的社会,当科技与资讯更加的发达时,人与智慧型相关产品之使用已不...
Day15-Overloading
函式多载(overloading),今天顺着蚂蚁书的顺序先讨论函式多载(overloading)与样...
[前端暴龙机,Vue2.x 进化 Vue3 ] Day10.条件渲染
当我们有区分,在某种条件下看到的会是 A 画面,某一些条件下看到的会是 B 画面...的情形,例如每...
[DAY-29] 你是谁,比你做什麽更重要
好拉~ 倒数第二天,我就来全部统整复习一下吧! 世界会改变 生命的重要本质 人生大哉问 信仰与理性...
杂七杂八问题篇
倒数第二篇~ 来个不分类的杂七杂八问题篇, 有些问题,不知道该怎麽分类, 而有些分类,这次没机会写到...