LabVIEW步进马达控制(初阶)
这篇文章使用LabVIEW配合MyRIO进行步进马达的控制,我使用的步进马达是小颗的那种,如果要用扭力较高的须配合马达的驱动器,大家知道步进马达的基本原理就是靠里面的四颗磁铁去轮流激磁而转动,程序的整体概念就是用LabVIEW的Case Structure配合For loop让马达内的磁铁不断的激磁从而达到转动,并且可以设置delay time控制速度,digital output是我的输出脚位,要与步进马达的四条线接一起,程序如下。
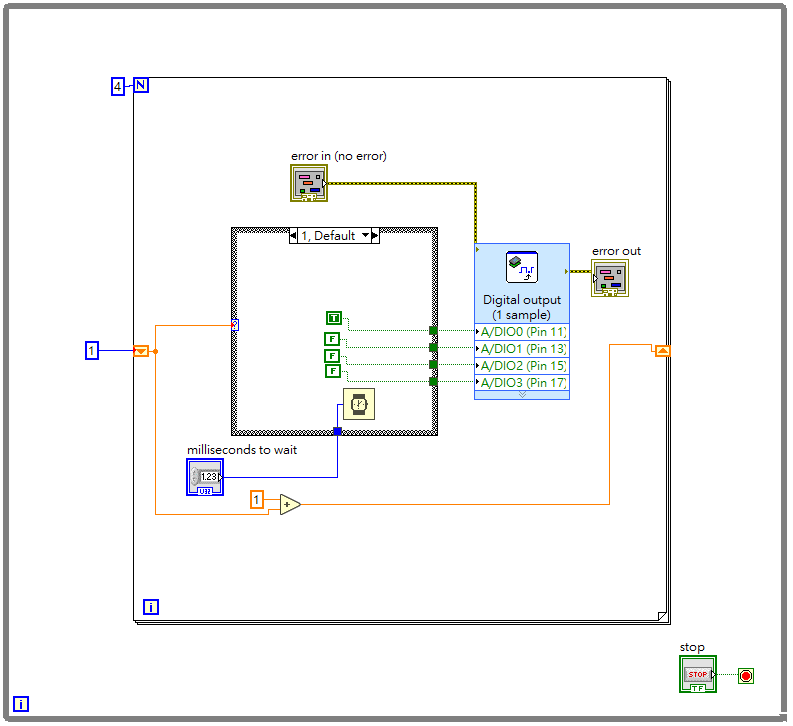
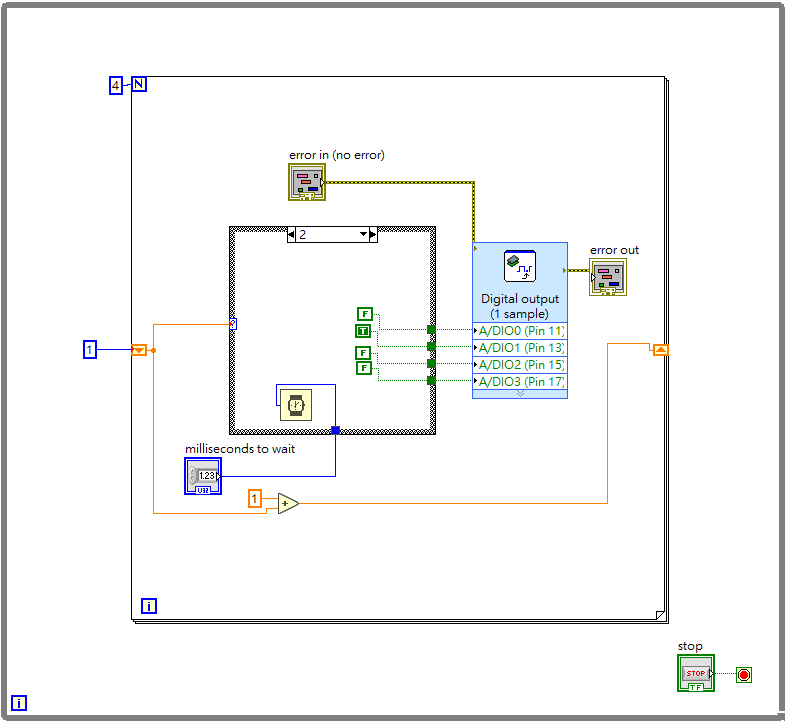
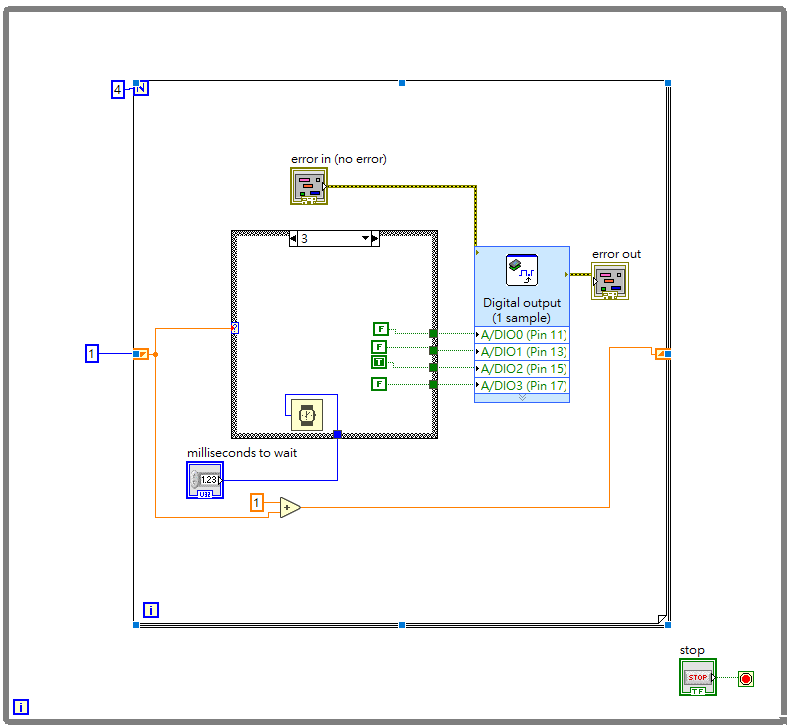
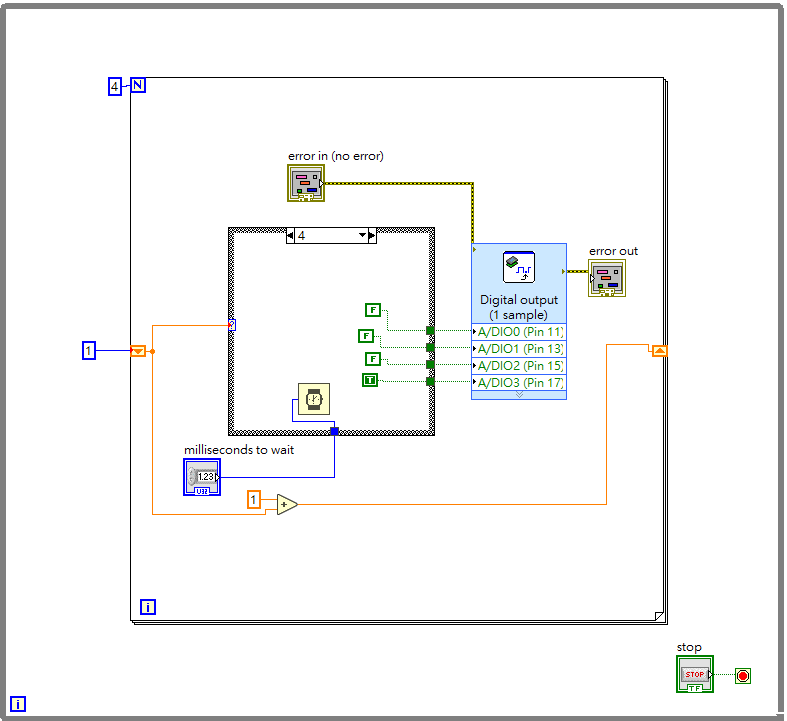
大家可以看到四张图片就只是Case Structure的Case不同而已,并且每个Case都让一个digital脚位输出去激磁然後重复四次,一直连续重复就可以旋转了,如果要让他反转只要该一下For loop就可以,这篇只是初阶之後有机会再将正反转,控制转几圈贴上来给大家看。
<<: 【基础影像应用篇】DAY4. 建立模型专案与影像标记流程(上)
Day 02 - 选择适合的DBMS
复习一下,上一篇提到的DBMS是一套提供多位使用者管理资料库的软件系统,负责资料存取和控制。一个DB...
[Day30] 持续整合与部署 - 我与 ASP.NET Core 3 的 30天
在现代化的网站开发中,逐渐也趋向将交付的功能切小,并频繁交付,使开发出来的功能可以小部分小部分快速确...
Code Generator 结构
接续上一篇的 annotation processor 实作,我们的 annotation proc...
[Day 05] 部署模式 — 我的模型叫崔弟
常见部署情况 根据需求不同,有不一样的部署模式,常见的情况如下: 提供新的产品/功能:常用的设计模式...
摊平摊平,愈摊愈平
这也是很多输家最爱用的手段之一,进场时说是「成长型」投资,被套牢了,改口说是「价值型」投资,你真的懂...