Day 28 - ROS 树莓派光达履带小车实作 (2)
延续昨天的进度,lidar装完以後就可以为SLAM做准备了。ROS用来做SLAM的package其实超级多,笔者使用的是hector_slam。
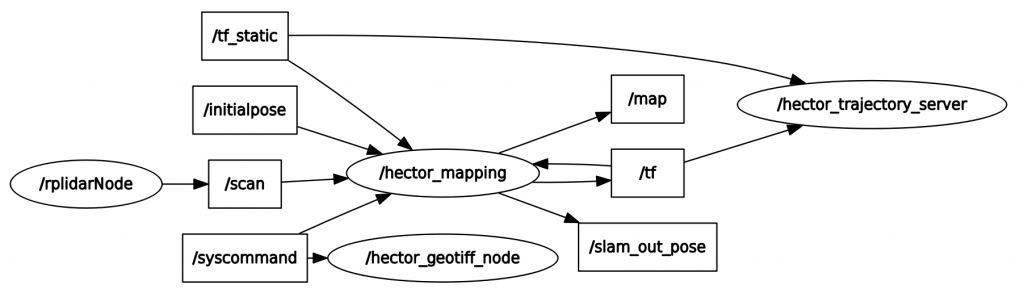
这个package包含3个项目:
- hector_mapping - 主要用来做SLAM
- hector_geotiff - 转换map和robot 路径成geotiff 档
- hector_trajectory_server - 存tf路径用的
接着就开始来实作吧!
首先,需要下载hector_slam到workspace/src内:
$ git clone https://github.com/tu-darmstadt-ros-pkg/hector_slam.git
回到workspace下catkin_make,就可以把别人写好的东西拿来用罗!
但是在使用之前,需要做一些topic和tf的转换,可以先看到hector_slam的node graph:
Reference
https://yoraish.com/2020/01/23/a-full-autonomous-stack-a-tutorial-ros-raspberry-pi-arduino-slam/
https://github.com/tu-darmstadt-ros-pkg/hector_slam
http://wiki.ros.org/hector_slam
<<: 二十九日目:JavaScript XMLHttpRequest 弐ノ章
D24 - Transaction
资料库透过transaction保证资料不会因为各种天灾人祸而消失。当高并发的需求同时涌入,如果没有...
[Day 15] ML 实验管理 — 翻开覆盖的陷阱卡~ 记帐小本本!
All life is an experiment. The more experiments y...
DAY22:优化器(中)
开始比较各种优化器 这边都先固定学习率0.01。 SGD+momentum(学习率设置0.001时,...
DAY2 - 排序(一)
今天介绍插入排序法&快速排序法~~ 主题还是希望围绕在实战刷题,毕竟刷题的时候有需要排序大多...
(30) 试着学 Hexo - 奇淫技巧 - 财富自由
前言 接下来这一篇当作讲讲废话,因此标题也很 X 话,但其实写部落格是真的可以赚一点点钱的唷。 写部...