Day 27 - ROS 树莓派光达履带小车实作 (1)
终於进入小车实作啦~~~~上个连假笔者本来就要来写的,结果拖到这个连假才有空来玩车车XD
首先介绍笔者使用的车车,是跟我同事借的车车,规格如下:
- raspberry 3B+
- rplidar 1A
- usb camera
- 履带车,附两颗马达
事前准备步骤
-
刷机
基本上笔者在刷机的时候都是按照此篇教学完成的,树莓派安装ubuntu真的很不友善QQ 然後3B+又有已知问题要改映象档,幸好教学内有神人帮忙完成了>____< -
灌driver
基本上这次的车子只有光达需要灌driver,因为是ROS常用的lidar,所以也有官方写好的package可以用了,只需要先去github下载package:
$ git clone https://github.com/Slamtec/rplidar_ros.git
把下载完的package丢到workspace内编译:
$ mv rplidar_ros/ ${workspace_name}/src
$ cd ${workspace_name}
$ catkin_make
编译完以後就可以执行写好的脚本了,不过需要先修改lidar的权限让程序可以存取:
$ sudo chmod 666 /dev/ttyUSB0
噢这边还有一个地方要注意,如果你的lidar位置不是在ttyUSB0的话,需要修改package内的rplidar.launch,把路径改成lidar所在的路径:
$ cd ${workspace}/src/rplidar_ros/launch
$ vim rplidar.launch
脚本如下:
1 <launch>
2 <node name="rplidarNode" pkg="rplidar_ros" type="rplidarNode" output="screen">
3 <param name="serial_port" type="string" value="/dev/ttyUSB1"/>
4 <param name="serial_baudrate" type="int" value="115200"/><!--A1/A2 -->
5 <!--param name="serial_baudrate" type="int" value="256000"--><!--A3 -->
6 <param name="frame_id" type="string" value="laser"/>
7 <param name="inverted" type="bool" value="false"/>
8 <param name="angle_compensate" type="bool" value="true"/>
9 </node>
10 </launch>
把第3行的ttyUSB路径改成lidar路径,笔者的是在ttyUSB1。
修改完权限和脚本以後,就可以执行啦:
$ roslaunch rplidar_ros view_rplidar.launch
就可以看到rviz出现了,还有会显示你的lidar扫出来的图:
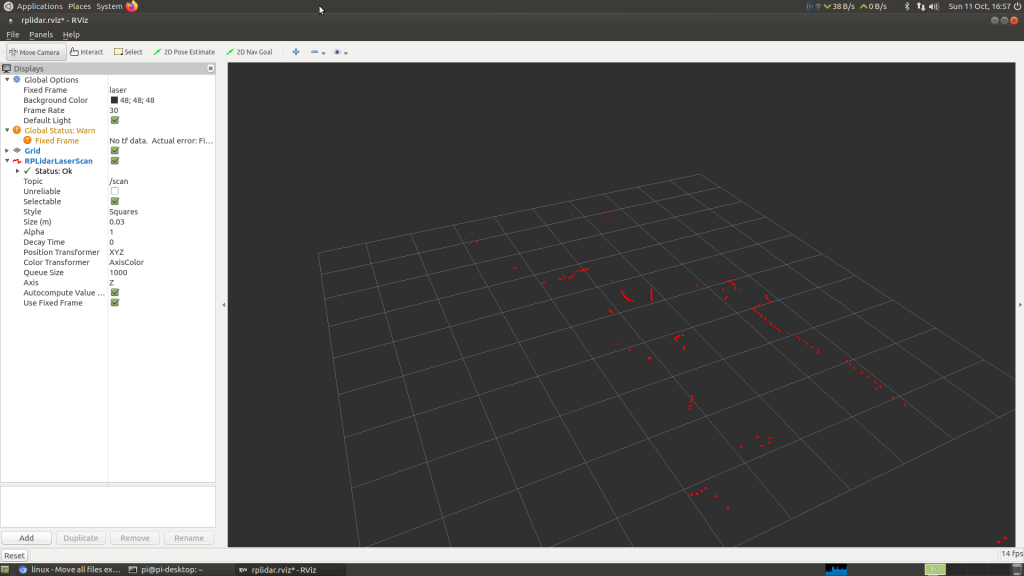
前置作业就完成啦~~
Reference
https://world.taobao.com/item/580809614752.htm
<<: [Day 26] 特徵图视觉化 Feature Map Visualization
>>: Day 26 测试 React 元件:使用 React Testing Library 体验 Test Driven Development (TDD) - 6
电脑突然出现奇怪的档案...
故事的开始是着样的 某天有位帅帅在自已的电脑上发现吃掉硬碟空间的凶手... 硬碟空间整个塞爆的概念....
Day_13 有线网路应用(五)
如果你看完Day_12 有线网路应用(四)跟着也买了管理型交换机,那麽看到这篇应该会想揍人XD。 今...
认识CSS(一):什麽是CSS
CSS(Cascading Style Sheets)是建立在HTML的基础上,它既不是标准程序语言...
(Day 22) ES6 的 let 、const
前言 在 ES6 新增两种变数方法 let 、 const ,不过我们比较常把 const 叫做常数...
JavaScript 语法解析器&执行环境&词汇环境 笔记
语法解析器(Syntax Parser): A program that reads your co...