[DAY 26] 利用Python程序码让机器人走出隧道1
前言
大家好,经过昨天对於控制 waffle 机器人程序码的介绍,相信大家都已经了解了相关的基本函式。不过笔者想要在这边先补充一个细节,那就是昨天在撰写 test.py 来尝试操控我们的 waffle 时,为什麽我们没有像之前的教学一样建立 Node、Publisher 或 Subscriber 呢?原因其实就在於我们在 test.py 中 import RobotControl 这个 class,而这个 class 当中就已经建立 robot_control_node 这个节点了,所以我们也就不用在档案中重新定义。假如今天我们需要分批写出很多不同的执行档,只要好好利用 class 就可以省下很多时间,也能让执行档本身越加简洁。
回到正题,今天要介绍的是笔者的研究成果,也就是透过 ROS 系统控制自走车,使自走车走行走於隧道中线并且顺利走出隧道。由於笔者对於 ROS 模型建构的基础较薄弱,因此我们就直接透过 turtlebot3 的 waffle 来进行模拟,这也是为什麽先前都以 waffle 做介绍的原因。由於整体篇幅有点长,因此会分成两天来进行介绍,那麽以下就开始介绍今天的主题。
使自走车走出隧道
修正函式库
在介绍程序码之前,为了使程序更符合我们 ROS 专案的需求,因此笔者有在 robot_control_class.py 当中的某些部分做修改,在此先行告知大家:
- 为使雷射回传的距离更加即时,因此我们将
self.rate = rospy.Rate(10)当中的数值调做调整,希望减少得到距离资讯与执行修正式之间的误差,修改後如下:
self.rate = rospy.Rate(200)
- 於
stop_robot(self)当中添加自变数self.rate = rospy.Rate(1),并於尾行添加self.rate.sleep(),修改後如下:
def stop_robot(self):
self.rate = rospy.Rate(1)
#rospy.loginfo("shutdown time! Stop the robot")
self.cmd.linear.x = 0.0
self.cmd.angular.z = 0.0
self.publish_once_in_cmd_vel()
self.rate.sleep()
会做此修正是因为希望在执行函式 stop_robot 後让自走车确实停下,避免停下的时间过短而使接下来的前行函式覆盖掉 stop_robot 的指令。
- 由於隧道本身可能会有一定的曲率,因此自走车需要能一边前行并同时修正前行角度的功能,但原 class 当中没有能够符合需求的函式,所以需要新增函式如下:
def turn_and_move(self, clockwise, x, z):
# Initilize velocities
self.cmd.linear.x = x
self.cmd.linear.y = 0
self.cmd.linear.z = 0
self.cmd.angular.x = 0
self.cmd.angular.y = 0
if clockwise == "clockwise":
self.cmd.angular.z = -z
else:
self.cmd.angular.z = z
self.rate.sleep()
self.vel_publisher.publish(self.cmd)
简单来说就是给自走车一个前行速度与角速度,相信函式本身并不难理解。
修正机器人前行角度的方法
上面有提到,为了应付隧道本身的曲率,所以我们必须一边前行并修正前行角度。但是自走车本身只会带有前行速度与角速度的资讯,对於前行方向的正确与否是人为主观判断的,为此我们必须想办法让自走车知道自己前进的方向是否正确。经过笔者团队的构思,使用的是透过距离来算出修正角的方法,以下利用图片简略说明之:
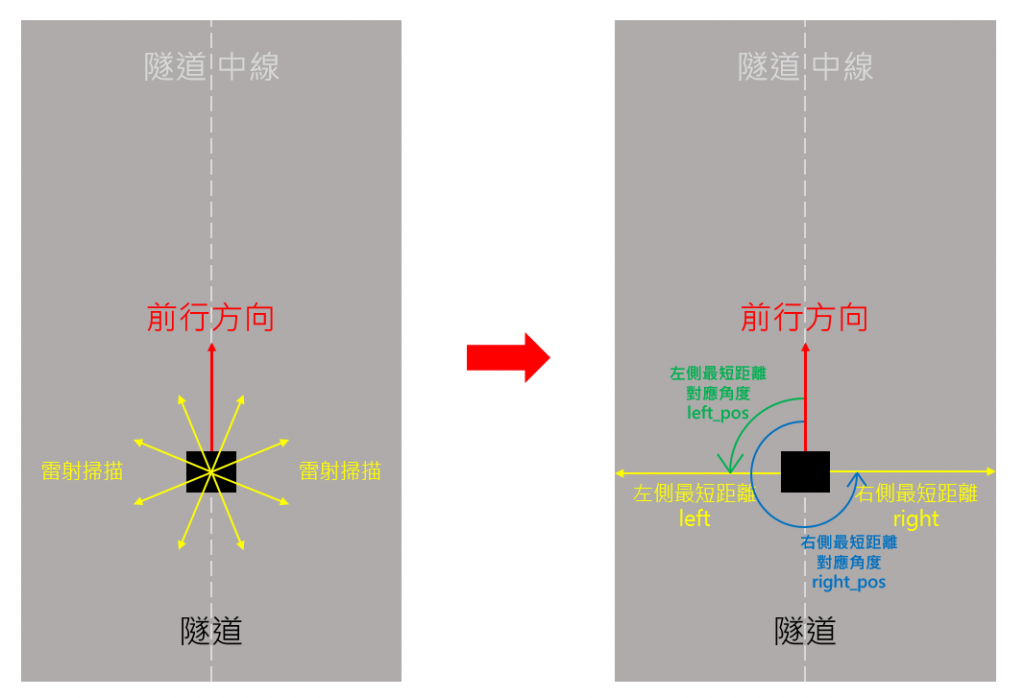
首先,先使自走车透过雷射扫描获取所有方位的距离资讯,接着利用这些数据找出左右最短距离所对应之角度,并且推算出当前自走车前行的方位。当前图片中显示的是隧道为笔直、自走车前行方向朝隧道正前方,且自走车位於隧道中线的情形,但若是自走车开始进入弯道,造成自走车前行方向开始偏离隧道正前方呢?我们再用一张图来解释:
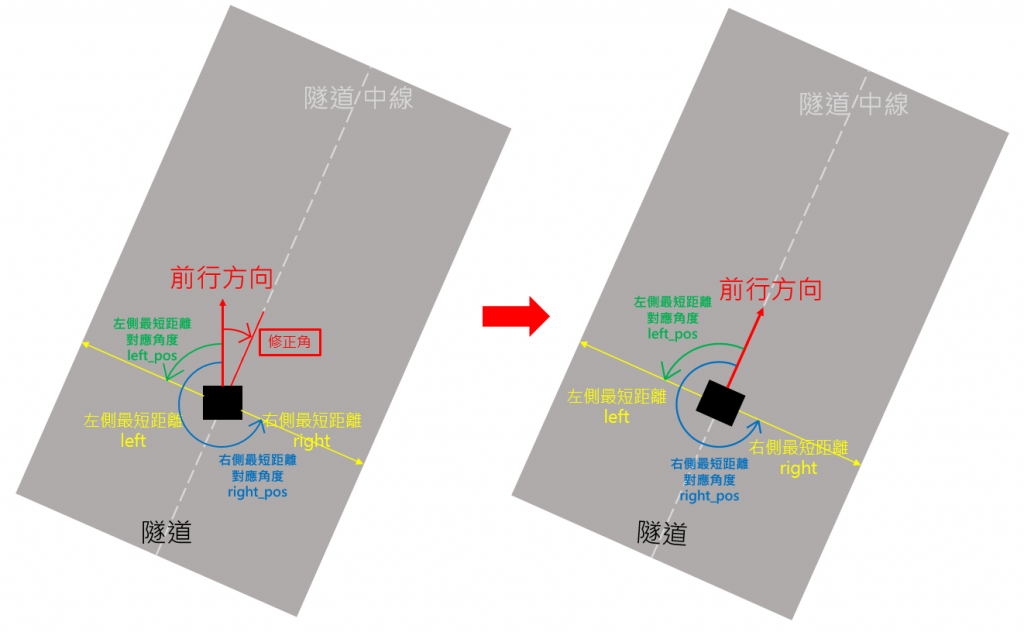
从这张图可以看到,当进入弯道时自走车根据最短距离所对应之角度得出修正角,此时再透过函式 turn_and_move 来进行角度的修正。
结语
今天我们先针对了函式库本身进行修改与扩充,然後再介绍了笔者团队对於修正机器人前行角度的方法。其实最主要的重点在於前者,只要了解相关参数如 rospy.Rate(10)、cmd.linear.x、cmd.linear.z 的应用,那麽就能写出更符合自己 ROS 专案需求的函式库,更甚至能够自己编译一个 class 供整个专案来使用,对於日後 ROS 的研究肯定有莫大的帮助。明天开始我们将会开始介绍程序码以及执行的部分,请大家敬请期待。
Layout, Render 与 View Helper
版型(Layout) 局部渲染(Partial Render) View Helper 在上个章节介...
Day 03 环境建立
环境设定 当我们在做开发时,首先要做的,就是准备好开发环境, 不然所有的开发都会无法进行, 所以首先...
Day 28 | Unity游戏开发 - 介面设置及场景转换
在上一篇文章提到对话系统的管理,今天我们要来说明主画面设定及场景资料转换。 需要注意的是,介面的素材...
[Day 01] 前言
大家好,我是来自台北教育大学玩游所的硕士生 May,在大学接触到如何写网页後,就毅然踏入了前端这个大...